水下导航定位技术综述
时间:2022-12-02 10:15:05 来源:柠檬阅读网 本文已影响 人 
张涛,夏茂栋,张佳宇,朱永云,童金武
(1.东南大学 仪器科学与工程学院,南京 210096;
2.微惯性仪表与先进导航技术教育部重点实验室,南京 210096;
3.江苏大学 农业工程学院,江苏 镇江 212013;
4.南京工程学院 工业中心、创新创业学院,南京 211167)
海洋中蕴藏着丰富的生物资源、矿物资源、可再生能源以及空间资源[1-3],已逐步成为人类赖以生存的第二空间,是实现社会可持续发展的新型领域[4-5].各国政府意识到海洋资源将大大缓解当前的能源危机,不遗余力地开发自主式水下航行器(AUV)以便勘探和开采海洋资源.AUV 凭借体积小、可控性好、续航时间长和搭载能力强等优点成为海洋开发的主要载体,可用于海洋调查、水下搜救、水下结构监测、水下监视和反地雷作战等军事和民用领域[6-8].
为了确保AUV 安全平稳工作,需要其具备导航定位和自主返航能力[9-11].此外,姿态、速度、位置等导航信息是AUV 精确控制的前提.因此,导航定位技术是AUV 核心技术之一.
卫星导航系统可为用户不限量全天候地提供导航、定位和授时(PNT)服务.但是,电磁波信号在海水这种高导电介质中衰减严重[12-13],迫使AUV 只有上浮接近水面才能获取卫星导航系统或其他无线电导航系统的导航信息,如果AUV 在深海环境航行,到达水面就需要很多时间和能耗,并且存在暴露的可能性.上述缺点限制了卫星导航系统或其他无线电导航系统在AUV 中的应用.目前,水下导航可以分为三种,即捷联惯性导航(SINS)、声学导航和地球物理场导航[14-15].惯性导航系统(INS)利用加速度计和陀螺仪输出的比力和角速度信息,解算出载体的姿态、速度和位置信息[16].INS 基于牛顿力学原理,无需向外部辐射信号,具有自主、隐蔽、输出频率高和输出信息全等优势.尽管如此,随着时间的推移,INS 误差将不断累积,因此需要依靠外部信息辅助修正.声学导航可分为多普勒测速仪(DVL)和水声定位系统[17-18].DVL 通过多普勒频移原理,测量出AUV 对底/对流速度,具有测速精度高优点,但存在部分波束失效情况,导致系统无三维速度输出.水声定位系统利用水声传播的时延和相位差,获取应答器和AUV 的相对几何关系[19-20].根据基线长度,可以分为长基线(LBL)、短基线(SBL)和超短基线(USBL).虽然水声定位精度高,但是需要提前布放应答器.地球物理场导航是利用地球物理参数进行匹配定位[21-23].地球物理导航具有全天候、隐蔽性强、精度不随时间累积等优点,但是要预先生成先验基准图.随着AUV 导航性能要求的不断提升,单一的导航模式已不能满足当前导航需求,以INS 为核心,辅以水声导航或地球物理匹配的组合导航系统已成为AUV 的重要发展方向,对于AUV 的高精度、长时航行和远航程具有重要的战略理论意义和实用价值.
本文回顾DVL、水声定位、地形匹配、重力匹配和地磁匹配水下定位技术,从算法原理、产品型号、优缺点和关键技术难点等角度展开阐述,最后展望水下导航的未来发展方向.
DVL 是利用声波在水下传播时产生多普勒效应测量载体速度的导航仪器[24].根据AUV 与水底相对距离,DVL 有底跟踪和水跟踪两种模式[25].当载体与水底相对距离在量程内,声波能射到水底,DVL 采用底跟踪模式输出对底速度.当AUV 与水底相对距离超出量程,声波不能射到水底,DVL 采用水跟踪模式.依据发射波速数量,可分为单波束、双波束和四波束,如图1 所示.
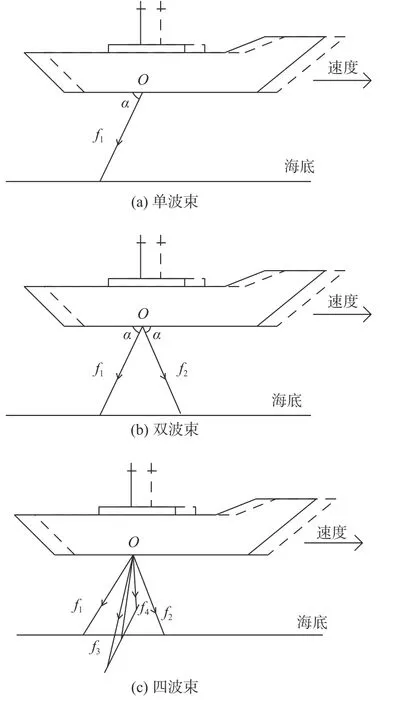
图1 DVL 波束示意图
单波束DVL 安装在AUV 底部,向水底发射一条波束,如图1(a)所示.由于AUV 与水底存在相对运动,发射和接收时刻的声波频率发射变化,即可测量AUV 在单一方向上的速度.双波束DVL 沿船首和船尾各发射一条波束,如图1(b)所示,双波束可以有效抑制AUV 在垂直运动对测速的影响.四波束DVL 分别沿船首、船尾、船左侧和船右侧各发射一条波束,如图1(c)所示,四波束消除垂直运动和摇摆运动对测速的干扰,提高DVL 测速精度和灵敏度,同时输出三维速度信息.
美国Teledyne RD Instruments 公司推出了Wayfinder、Pathfinder、Tasman、Pioneer 四款类型的DVL设备,使用范围覆盖AUV、无人遥控潜水器、无人/有人水面艇以及拖曳系统,全系配套INS,具有测速精度高和范围广的优点.Rowe Technologies Incorporated (RTI)公司研制SeaPILOT 具有300 kHz、600 kHz、1 200 kHz 三种工作频率,对底量程为8~150 m,对水量程为30~300 m,常规采用四波束Janus 结构,最多扩展八波束Janus 结构.LinkQuest 公司推出NavQuest300、NavQuest600、NavQuest600 Micro,具有尺寸小、重量轻、传输快、测速准和作用范围广等优点.DVL 设备具体性能参数如表1 所示.

表1 DVL 设备性能参数
由表1 可知,DVL 测速精度与量程和工作频率相关,工作频率越高,测速精度越高,量程越小.国内对DVL 研究主要集中于哈尔滨工程大学、东南大学、中科院声学所、国家海洋技术中心、中船重工以及中海达卫星导航技术股份有限公司.自1980 年起中科院声学所开始研究多普勒测速理论,完成窄带原理样机、宽带原理样机、工程样机和定型样机的研制,其中300 kHz 的DVL II 型测速精度达到0.4%v±5 mm/s,量程为270 m.中科院声学所联合海鹰公司共同推出300 kHz、600 kHz、1 200 kHz 三种工作频率新型DVL 设备,最高测速精度达到0.3%v±3 mm/s,量程200 m,更新频率1 Hz.中海达公司研制具有四波束Janus 结构的iFlow 声学多普勒流速剖面仪,最高测速精度达到0.25%v±2 mm/s.
SINS/DVL 组合导航主要涉及对准、标定、数据融合和故障检测四个主要方面,下面依次展开介绍.
1.1 SINS/DVL 对准技术
惯性导航可以为AUV 提供实时姿态、速度和位置等导航信息,然而使用前必须进行初始对准,初始对准的结果极大程度决定了最终组合精度.通常AUV 在系泊或水面航行时接收GPS 信号,进行初始对准工作.在特定任务背景下,AUV 需要在水下运动过程中完成初始对准,此时却很难接收到GPS 信号.因此,不少学者提出基于DVL 辅助的动基座对准.CHANG 等[26]将对准划分为粗对准和精对准两个阶段,第一阶段利用某一点的速度和位置信息,采用最优四元数方法,快速获得一个粗略的姿态,第二阶段利用非线性滤波算法,得出准确的初始姿态.文献[27-29]采用回溯方法,加快对准过程.针对DVL 量测信息存在野值降低对准精度问题,CHANG 等[30]提出包含异常值检测的姿态确定算法,当横向速度大于设定阈值时舍弃.针对上述方法忽略了洋流的存在,XU[31]提出动基座鲁棒对准算法,通过分析观测向量和参考向量之间的关系,设计了用于异常值检测的幅度匹配方法,从而抑制野值对初始对准的影响.针对AUV 处在高机动状态下DVL 发射和接收时刻姿态发生变化,YAO 等[32]设计了基于姿态补偿的动基座对准算法,与传统的粗对准算法相比,该算法缩短对准时间和提高了对准精度.
1.2 DVL 误差标定技术
DVL 刻度因子误差和DVL 与INS 之间的安装误差均是影响SINS/DVL 组合精度的主要因素,因此使用前需要对上述误差进行修正.上世纪八十年代,JOYCE 等[33]提出基于最小二乘的标定方法,利用GPS 输出的速度信息,完成航向安装误差角的标定.上述方法仅仅完成单一维度标定,无法满足高精度导航的需求.因此不少学者在此基础上研究了三维安装误差角的标定[34].KINSEY 等[35-37]先后提出基于位置、速度和加速度观测的标定算法,三种算法均是构造两个不同坐标系的三维向量,借助最小二乘求解安装误差角.位置和速度观测时需要外部信息辅助,如LBL 或者GPS 提供精确的位置和速度信息,难以直接运用到实际过程.加速度观测无需外部信息辅助,即可完成自标定,但是对载体的机动性提出较高的约束.上述文献忽略了刻度因子误差对导航精度影响.文献[38]提出了一种基于迭代的标定方法,可以同时估计刻度因子误差和安装误差角,但要求载体保持长时间的直线运动.文献[39]提出新型的标定算法,利用DVL 的误差模型,分别建立基于位置和速度的观测向量和目标函数,利用基于最优四元数的拟牛顿迭代法,使得误差快速收敛.除了最小二乘法、迭代法,有学者研究基于卡尔曼滤波(KF)的标定算法,将安装误差角和刻度因子写入状态方程[40].针对将安装误差角矩阵基于小角度近似的问题,WANG 等[41]将安装误差角以四元数的形式表达,分别采用零观测方程和速度观测方程,估计出刻度因子误差和较大的安装误差角.
1.3 SINS/DVL 数据融合技术
INS 在短时间内保持较高的导航精度,但定位误差随时间发散,利用DVL 提供准确的速度信息,通过KF,实现对AUV 导航误差的抑制.SINS/DVL组合方式有两种,即松组合和紧组合模式[42],如图2所示.
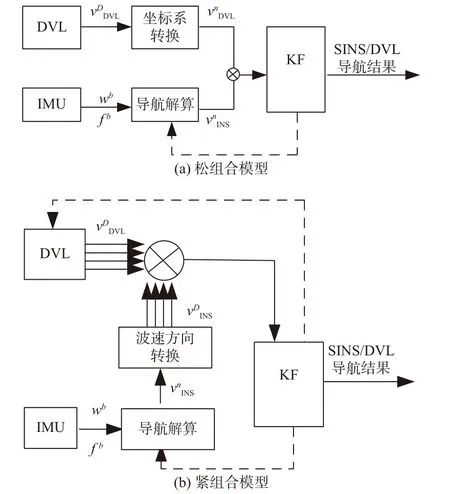
图2 SINS/DVL 组合模型
松组合利用DVL 量测出的速度信息与INS 输出的速度信息相组合,模型简单,但至少需要3 个方向的波束信息.紧组合直接利用DVL 输出4 个原始波束信息与INS 估计出4 个波束进行滤波,定位精度高且接收波束的数量不再必须为4 个,但计算量要高于松组合.KARIMI 等[43]比较了扩展卡尔曼滤波(EKF)和无迹卡尔曼滤波(UKF)在SINS/DVL 组合导航上的性能差异,结果表明EKF 具有更高的估计精度.针对SINS/DVL 组合导航中常规滤波算法精度不高的问题,文献[44]提出了一种平方根无迹信息滤波器.由于洋流、温度和盐度的变化,DVL 的噪声统计方差发生变化.DVL 在融合过程中不准确的测量噪声协方差导致定位误差变大,甚至会出现滤波发散的情况.因此,不少学者提出基于自适应的INS/DVL 组合算法[45-47].自适应滤波算法能够根据外部环境估计出测量噪声协方差,但采用滑动窗或指数加权方式获取的噪声协方差存在时延.YAO 等[48]将交互式多模型滤波引入到SINS/DVL 组合算法中,通过建立多个模型,实时估计出噪声矩阵,提高系统自适应能力.针对DVL 量测信息存在野值问题,HOU 等[49]提出基于M估计的滤波算法,实现对DVL 量测野值的抑制.
1.4 SINS/DVL 故障检测技术
在下列场景中,DVL 数据存在失效状态影响导航精度:
1) 航行器与海底的距离超过了DVL 的量程;
2) 海底存在淤泥时,DVL 发出的声波不能被反射回来;
3) 声波传播过程中遇到海洋生物时,DVL 发出的声波无法到达海底;
4) AUV 进行大角度机动时,DVL 在大横滚和大俯仰的情况下可能接收不到回波.
ZHU 等[50]采用基于高斯过程回归的故障检测算法来预测KF 的新息,利用粒子群算法求解最优超参数,通过比较预测新息和KF 输出新息,判断DVL数据是否发生故障.WANG 等[51]通过判断INS 估计出波束速度和DVL 实际输出速度差值是否在一定阈值内,从而确定DVL 是否发生故障.最简单处理DVL 故障的方法为隔离,即对当前DVL 数据舍弃,仅进行状态更新.如果长时间不采取量测更新,导致累积误差不断增加.因此,有学者提出通过构造虚拟波束代替无效波速方法,提升系统容错能力.文献[52]采用基于神经网络的支持向量回归估计算法建立惯性速度输出与DVL 速度输出的映射关系,辅助DVL 失效后的INS.KANG 等[53]在自适应卡尔曼滤波(AKF)算法的基础上,将人工神经网络引入数据融合算法,进一步提高了组合导航的容错能力,但神经网络算法存在计算量大且训练时间长等问题.针对波束受限问题,LIU 等[54]根据水下无人状态运动特性,简化坐标转换矩阵,利用压力传感器输出的深度信息,构建与已知波束垂直的虚拟波束,实现高精度导航.
声波相较于电磁波在水介质中衰减速度慢且传播距离远,所以声学定位成为水下导航的主流方式.在海底固定一个或者多个位置已知的应答器,从声波信号中获得AUV 与应答器之间距离和方位角信息,利用相对几何关系确定AUV 绝对位置.根据接收声学基阵的长度,水声定位系统可分为LBL、SBL 和USBL[56].
LBL 由一个安装在AUV 底部的声学换能器和一个固定在海底的声学基阵构成,其中声学基阵由多个应答器组成,如图3(a)所示.在声速已知的前提下,记录水声传播时间,计算应答器与载体之间的斜距信息,借助球面交汇原理确定AUV 位置.因此,水下应答器的数量至少是三个,并且声学基阵的几何位置决定了定位精度.长基线的基线长度百米以上,因此定位精度最高,通常约1 m,如果应答器的位置标校的准确,定位精度可到达0.01 m,适用于大区域内的作业,如水下目标定位、海洋测绘等.LBL 需要对多个应答器进行布放、校准、回收等复杂操作,作业成本高,且在深海环境下水声信息更新率低.

图3 水声定位示意图
SBL 由安装在载体不同位置的多个声学基元组成和一个固定在海底的应答器构成,如图3(b)所示.定位精度取决于基元间距,间距越大,定位精度越高.因此,短基线定位精度介于LBL 和USBL 之间.SBL定位系统组成简单,基元布放方便,但定位范围相对较小.
USBL 由一个安装在AUV 底部的集成的声学基阵和一个应答器构成,其中声学基阵由多个对称的水听器组成,如图3(c)所示.USBL 的基线长度一般小于米级,凭借体积小、携带方便和安装灵活等优势,被广泛应用于商业、科研以及军事领域.相较于LBL 和SBL,USBL 定位精度最低且作用范围最小,因此,改善超短基线定位精度和扩大作用范围成为近几年的研究热点.LBL、SBL 和USBL 的定位性能如表2 所示.

表2 水声定位系统分类
在水声定位产品研发方面,英国的Sonardyne 公司、法国的iXBlue 公司、挪威的Kongsberg 公司、美国的LinkQuest 公司居世界领先地位.英国的Sonardyne 公司的超短基线产品为Ranger-USBL 系列,包括Ranger2,Micro-Ranger 2 和Mini-Ranger 2.Ranger 2适配性和功能性最强,作用范围可达11 000 m,斜距精度0.04%D,其中D代表斜距.Micro-Ranger2 具有体积小、重量轻、便携性和操作简单等优势,主要服务于1 000 m 内的近海区域.挪威的Kongsberg 公司推出HiPAP 和 µ PAP 两个系列,分别适用于深海和浅海探测,作用范围分别为7 000 m 和4 000 m,内置传感器分别为HAIN Subsea7000 INS 设备和MRU-3 姿态传感器,定向精度分别为0.04°和0.25°,测距精度均优于20 mm.法国IXBlue 公司水声定位产品包括了LBL 和USBL 两类,定位精度小于0.01 m,工作深度可达6 000 m,若载体搭载INS,可实现稀疏应答器组网定位,USBL 系统则有GAPS 和Posidonia 2 个系列.GAPS 产品集成光纤惯性器件、全方向的声学天线和超短基线,作用范围可达4 000 m,在信噪比为20 dB 情况下,斜距精度0.06%D,测距精度0.02 m,定向精度0.03°,适用于浅海环境下的ROV 导航、采矿和潜水员跟踪等.Posidonia 为GAPS 增强版,作用范围扩大为10 000 m,可用于深海环境下的拖曳、管道或者电缆的铺设.美国LinkQuest 公司最新推出的TrackLink 系列产品,其中TrackLink5000HA 作用范围为10 000 m,定向精度0.15°,斜距测量精度0.3 m,定位精度为0.3%D,可同时追踪8 个目标.表3 详细描述各类型水声定位设备产品性能参数.
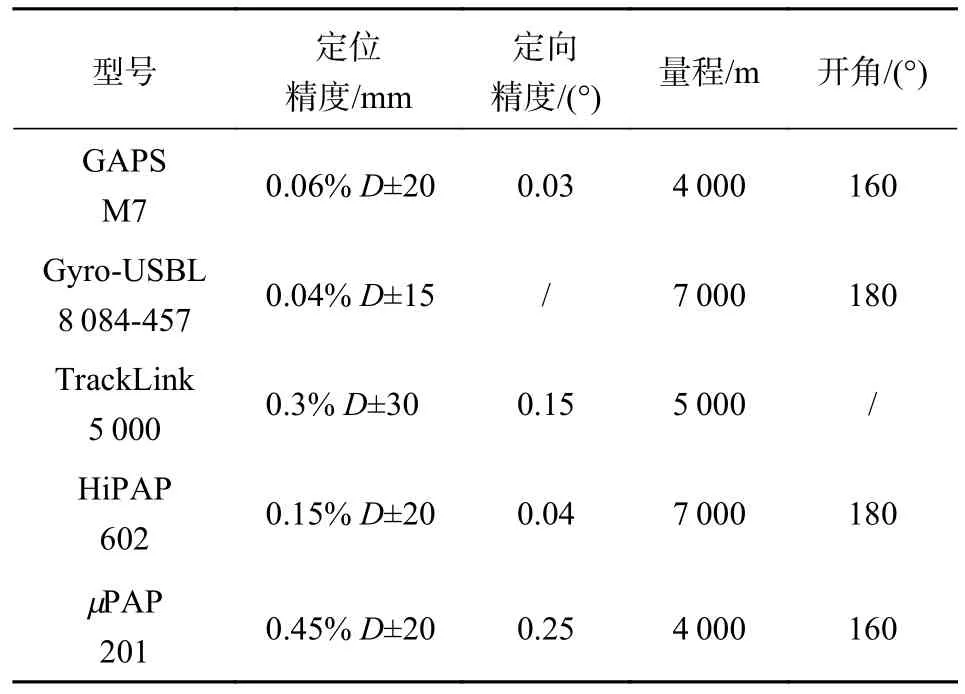
表3 水声定位设备性能参数
根据远海/深海探测、近海防卫、走向深蓝的战略部署,国内一些高校和科研院所也开始对超短基线开展了有益的探索.自2002 年至今,哈尔滨工程大学分别完成了国内首台深海USBL 定位系统样机、工程样机和系统产品的研制.嘉兴中科声学科技有限公司生产的USBL 产品主要有PS138、PS117、PS113 和PS155 等,其中,PS117 产品作用距离为3 000 m,声头深度为50 m,测向精度为1°,测距精度为0.2 m,定位精度为1%D±1 m.中海达公司推出基于水声宽带扩频技术和高精度时间同步技术的USBL 产品,如iTrack-UB1000 和iTrack-UB3000,同时融入了差分RTK-GPS 技术,工作频率为15~25 kHz,作用距离为2 000 m,定位精度为1%D±0.5 m,可以满足各种环境下的高精度水下定位需求.2017 年,东南大学和中国科学院声学研究所,研制了国内首套INS/USBL一体化工程样机,填补了国内空白.为了进一步提高USBL 的定位精度,不少学者分别从安装误差标定、组合模型和滤波算法等角度开展研究.
2.1 SINS/USBL 误差标定技术
INS/USBL 的安装误差是影响组合导航定位精度的关键因素之一.在安装过程中通常很难保证USBL与惯性传感器做到坐标系完全统一.传统的标定方法可归纳为最小二乘法和矩阵分解两大类.唐秋华等[57]采用最小二乘方法实现USBL 系统的校准,标定结果受采样点的限制,仅适用于安装误差角较小的情况.郑翠娥等[58-59]采用加权最小二乘法解决了安装误差角的标定问题,并通过试验验证算法的有效性.虽然算法结构简单,但是只适合离线计算.2008 年,CHEN[60]采用测量船绕着海底的应答器做圆轨迹行驶,依次计算出横滚误差角、航向误差角和俯仰误差角,对于偏心圆和非标准圆轨迹都有很好的效果.在此基础上,CHEN[61-62]改进超短基线系统标定算法,标定的轨迹可以为直线,并进行了航迹测试,并取得较快的收敛速度.2018 年,东南大学童金武等[63]提出了一种基于增量迭代的安装误差角动态标定算法,实现安装误差角的动态在线估计.在忽略其他误差项的情况下,1 000 m 的定位范围内,可以将由安装误差角引起的水平定位误差从8 m 减小到2 m.ZHU 等[64]分析了超短基线系统实时标定问题,采用姿态确定方法,快速准确标定出安装误差角.文献[57-64]忽略另一个重要的定位误差源,即杆臂误差.近年来,基于KF 的USBL 系统标定方法被广泛研究.由于方位信息存在,USBL 系统的测量方程具有很强的非线性.EKF、容积卡尔曼滤波器(CKF)和UKF 都适用于非线性系统.ZHANG 等[65]研究基于UKF 的USBL 系统标定算法,状态变量同时包含安装误差角和杆臂误差,算法能够在仿真环境和湖试环境下快速收敛.
2.2 SINS/USBL 组合模型
根据匹配组合机理和信息类型的不同,将SINS/USBL 组合分为松组合和紧组合[66].松组合以位置匹配的方式进行的组合,即以INS 给出的经度、纬度和高度与USBL 解算出的位置信息的差值作为位置观测量.紧组合以USBL 直接输出的相对量测信息(时延、方位角等)进行匹配组合.由于受标定误差、姿态误差、应答器位置误差和USBL 系统量测误差等影响,松组合解算出的绝对位置会存在一定的误差,定位精度比紧组合差,图4 给出了SINS/USBL 组合模型示意图.

图4 SINS/USBL 组合模型
2007 年,LEE 等[67]提出了一种伪超短基线系统辅助定位算法,仅仅在AUV 上装了2 个接收器,测出海底应答器与每个接收器的距离,与SINS 位置信息建立距离差模型,同时增加声波出射角的信息观测量,构建了SINS、DVL 和USBL 的组合导航系统,水池实验结果表明在仅仅利用测距的基础上,声学系统提供的信息能够有效修正SINS 的位置误差.2008 年,李守军等[68]提出了SINS/USBL 松组合导航系统模型,推导了SINS/USBL 组合导航系统的状态方程和量测方程,试验结果表明USBL 系统能够修正SINS 的位置误差,证明模型正确性.2010 年,GENG 等[69]提出了一种基于SINS/USBL 紧组合模型,仿真验证该模型相比松组合具有更好的定位精度.2013 年,MORGADO 等[70-72]分析INS 与USBL的误差特性基础上,采用直接法反馈校正随机漂移误差,提高导航精度.针对AUV 运动效应带来时延测量误差,ZHANG 等[73]提出基于时间回溯的量测方程,提高了AUV 在高机动情况下组合精度.
2.3 SINS/USBL 滤波技术
海洋环境噪声是海洋中水声信道的干扰背景场,USBL 水听器接收的量测信息中就包含有海洋环境噪声,表现为加性噪声和乘性噪声[74-75].加性噪声表现为水声量测噪声呈现出未知或时变的统计特性.乘性噪声具体表现为水声量测信息出现没有规律性的野值.针对USBL 量测协方差矩阵未知或时间变化,XIA 等[76]提出基于变分贝叶斯理论的自适应滤波方法,实现误差的快速收敛.针对过程噪声和量测噪声存在时延和野值问题,XU 等[77]提出了一种基于Huber 估计的鲁棒滤波,通过极大似然估计(MLE)和定点迭代,实现状态的最优估计.针对量测野值呈现非高斯特性问题,WANG 等[78-79]将学生分布应用于INS/USBL 组合导航模型,提出了一种基于学生t的组合模型,实现了对野值的抑制,并且其性能优于传统鲁棒滤波算法.
地球物理场导航是利用勘测的磁场、重力场、海底地形的时空分布特征,与先验基准图进行特征匹配,实现AUV 的自主导航方法.其基本思想为先对预计航行海域进行物理测绘,将采集到的特征保存下来,绘制成基准图并存入计算机中.在AUV 进行地球物理场导航时,利用携带的各种传感器采集AUV 周围的各种物理参数,并将其输入计算机中与相应的基准图进行特征匹配,从而获取确切的位置信息,图5 描绘地球物理场辅助INS 过程.海洋地球物理场导航根据采用物理参数的不同可具体分为地磁匹配导航、重力场导航、地形匹配导航等.

图5 地球物理场辅助INS 示意图
3.1 重力辅助的INS 技术
重力匹配导航是根据地球重力场的变化进行定位的,不需要收发外界信号.因此,它具有隐蔽性、实时性和高精度等优点.重力辅助惯性导航系统由INS、重力基准图、重力测量传感器和匹配算法四部分组成[80].AUV 携带的重力测量传感器,测量当前位置的重力特征信息,将重力信息与预先存储的重力数据库地图进行比较,通过匹配算法估计真实位置.因此,重力基准图构建、适配区选择和匹配算法为重力辅助惯性导航的核心技术.
3.1.1 重力基准图构建技术
传统海洋重力场通过海面船舶或者海底拖曳的方式测量得到[81-82],虽然精度较高,但都存在效率低和空间覆盖范围小的缺点.随着近年来机载重力仪和高精度定位技术的快速发展,机载重力仪已成为替代方法,短期内获取大面积区域海洋重力场信息[83-84].此外,卫星直接测量大地水准面高度变化,通过拉普拉斯方程获取全球范围内海洋重力场[85-86].
重力设备主要研发公司和研究所为:加拿大Micro Gravity 公司(GT-2M 型号)、美国Microg Lacoste 公司(SEA III 型号)、俄罗斯圣彼得堡科学研究中心电气仪表所(Chekan-AM 型号),而国内大都集中在天津航海仪器研究所(ZL11-1A 型号)、中科院(CHZ 型号)和航天十三所(SAG 型号)等,表4 给出了海洋重力仪性能参数[87].
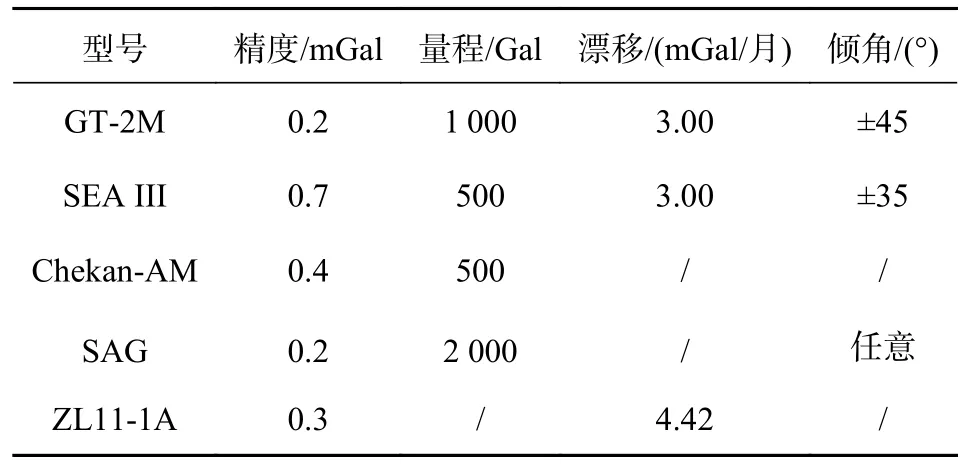
表4 海洋重力仪设备性能参数
在重力匹配过程中,要求重力基准图满足高分辨率和大面积要求,使得重力传感器采集的数据位于网格中央,提高匹配准确率.因此,不少学者提出插值重构思想[88-90],提高基准图分辨率和精度,各类算法的优缺点如表5 所示.
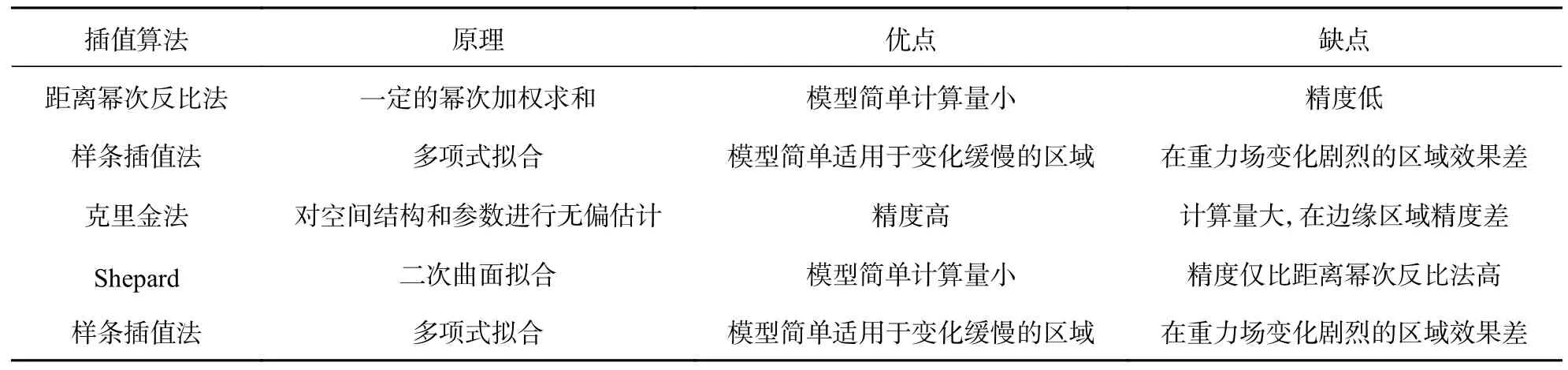
表5 插值法优缺点分析
3.1.2 重力适配区选择
重力匹配区域选择是重力辅助惯性导航的关键技术[91-92].导航精度与AUV 所在区域重力场参数的变化密切相关,重力场参数变化明显的区域,匹配精度越高.因此,需要根据区域的重力分布特征选择合适的区域,进行重力匹配.传统的适配区选择方法主要依靠重力异常的局部统计参数,例如衡量区域数据离散程度的标准差、数据平滑程度的粗糙度、随空间变化程度的梯度和平面相关度以及包含信息量程度的信息熵等[93].针对基于单一统计参数的匹配区选择存在匹配效果差问题,研究人员采用层次分析、主成分分析(PCA)、模糊推理和神经网络等手段[94-95],融合多个统计参数,选择最优适配区.宫京等[96]提出分子分析法,将多个统计参数优化为少量参数,从而快速确定适配区,与PCA 相比较,精度更高.然而传统算法存在两个缺点,参数阈值的选取存在随机性和没有考虑重力场空间特性,容易漏掉潜在匹配区域,从而影响重力匹配的准确性.针对在某重力场特征仅在一定方向范围内变化明显,WANG 等[97]提出重力异常和向量差作为评价指标,提高匹配精度.针对方向矢量仅为空间特性单一方向,WANG 等[98]研究基于Delaunay 三角剖分算法,建立重力场的三维模型,寻找更多的空间特征作为潜在匹配区域.
3.1.3 重力匹配算法
重力匹配算法可分为序列匹配和单点匹配两大类.序列匹配算法包括等值线最近迭代(ICCP)算法和相关的极值算法[99-101].ICCP 算法通过最小化目标函数,使INS 轨迹接近真实轨迹,但它对初始位置误差很敏感,当初始误差较大时容易引起不匹配.相关极值算法最典型的代表为地形匹配制导(TERCOM)[102-103],对重力序列测量与重力基准图进行相关性分析,其中代价函数一般选择平均绝对误差和均方差.该算法能有效地纠正INS 的误差,对INS 的初始位置误差不敏感.然而相关的极值算法受航向误差的影响很大.作为序列匹配算法,这两种算法在匹配前需要采集一系列位置点的重力异常序列,这会导致实时性差.为了追求更好的实时性、更高的定位精度和更少的计算负担,不少学者对传统的序列匹配算法进行了改进[104].此外,科研人员提出基于单点匹配的滤波算法,但存在抗干扰能力差和测量模型线性化误差大等问题,限制了该算法在复杂水下环境中的实用性.为了减少线性化误差,有学者提出基于二阶EKF 算法,然而,二阶EKF 的测量黑塞矩阵(Hessian Matrix)难以用数值方法逼近,阻碍了二阶EKF 在重力匹配导航中的应用.若采用无迹KF 处理重力辅助惯性导航系统,需要调整自由度参数,保证滤波的稳定性和精度.针对重力传感器受到异常值干扰从而导致测量噪声呈现非高斯分布的问题,不少学者研究基于鲁棒滤波的匹配算法[105-106].WANG 等[107]提出了基于CKF的鲁棒匹配算法,通过收敛性分析和稳定性讨论,证明所提算法能够抑制野值,并实时准确估计出当前位置.上述单点匹配算法存在所有采样点相互独立,出现误匹配或者匹配结果可信度不高等问题,不仅不能纠正INS 的累积误差,而且会影响AUV 航行安全.WANG 等[108]提出基于向量匹配算法,利用相邻采样点的位置关系,采用粒子滤波方式,实现匹配结果更加稳定和系统定位精度更高.
3.2 地磁辅助的INS 技术
地磁辅助INS 的基本原理是将载体测量出的磁测信息与预先存储的地磁基准图进行相关度匹配,确定载体当前位置,限制INS 误差发散[109].地磁导航具有以下优点:1) 地磁检测过程中无需向外部发射能量,具有高度隐蔽性和无源性;
2) 地磁为地球固有矢量场,地磁误差稳定不随时间积累;
3) 地磁信息丰富,如地磁场总强度、三轴地磁场强度、磁偏角、磁倾角和磁场梯度,为适配区选择和匹配算法提供多种独特特征.因此,地磁误差补偿、适配区选择和地磁匹配均是高精度地磁辅助INS 急需解决的问题.
3.2.1 地磁误差补偿技术
随着电磁感应、超导磁效应和磁光效应等物理规律的发现,各类磁传感器可直接应用到地磁辅助INS 中,如磁通门磁力仪、光泵磁力仪、质子磁力仪和超导磁力仪等[110-112].尽管传感器测量精度理论上可以满足导航要求,然而,在实际应用中,磁传感器容易受到磁干扰误差和自身仪表误差影响,其中仪表误差包括灵敏度误差、零偏误差和非正交误差,磁干扰误差包括软/硬磁场误差、随机磁场误差、涡流磁场误差和非对准误差.因此,磁传感器使用前必须对各类误差进行补偿.误差补偿可分为2 种,硬补偿和软补偿.硬补偿指的是通过在载体附近安装永磁体或三相线圈,限制载体上的电气设备产生的干扰磁场,此方法需要不断调整其位置,操作复杂且精度低.软补偿指的是根据磁场特性建立数学模型,直接补偿磁传感器输出.早期学者采用基于姿态约束的罗差校正法,采用外部高精度的航向角信息修正磁传感器输出的航向角,此方法需要外部辅助信息且只能修正单一维度信息.针对地磁矢量模不随姿态变化而变化的特点,学者提出矢量模检测方法[113],从而摆脱了对姿态依赖,简化了误差补偿过程,但算法存在平方项,可能存在局部最优情况.ALONSO 等[114]提出两步标定法,第一步将平方项近似为线性项,使用最小二乘法求解初值,第二步将计算出的初值代入到牛顿迭代法中,快速估算出仪表误差.CRASSIDIS 等[115]同样利用最小二乘求解初值,第二步采用非线性卡尔曼滤波,实时估计出仪表误差,但算法收敛受初值影响.针对地磁矢量场误差修正问题,文献[116-118]提出基于椭圆拟合的补偿方法,具有精度高且鲁棒性强优点.针对基于参数估计算法收敛速度慢的问题,文献[119-120]建立包含灵敏度误差、零偏误差和非正交误差的目标函数,通过粒子群算法或者蚁群算法求解最优参数.
3.2.2 地磁适配区选择
由于每个适配区包含不同的地磁信息,最终的效果大相径庭.选择地磁特征丰富的区域,有助于提高导航精度和稳定性.因此适配区的选择是地磁辅助惯性导航的关键技术.适配区选择主要包含特征参数和评价函数两个方面.特征参数有地磁标准差、地磁粗糙度、地磁坡度标准差、峰态系数、偏态系数、地磁信息熵和地磁相关系数[121].评价函数有分形维度法、主层成分分析法、模糊法、遗传算法、支持向量机(SVM)和深度神经网络等[122-124].针对单一特征参数存在评价不全面的问题,王鹏等[125]提出基于多地磁特征的综合评价法,提高系统匹配概率.陈有荣等[126]提出基于分形维数的评价方法,仿真结果表明分形数值越大,匹配成功率越高,且算法能够抑制量测噪声.针对传统方法只考虑全区间适配性,赵建虎等[127]提出基于方向矢量的适配性算法,研究适配性与载体运动方向之间的关系,提高适配准确率.张凯等[128]研究基于SVM 的适配区选择算法,构建量测噪声与特征信息和匹配算法的非线性映射关系,实现适配区可靠性划分.针对多个特征选取的主观性,肖晶等[129]通过深度卷积神经网络进行分类,运用粒子群算法优化参数,提升地磁特征提取效率.种洋等[130]提出基于主层分析和神经网络结合的适配区选择算法,首先通过主层分析提取特征参数,再利用神经网络完成映射关系,自动识别适配区.
3.2.3 地磁匹配算法
地磁匹配是地磁辅助INS 的关键技术,决定测量轨迹和磁力基准图是否正确匹配,影响最终导航精度.目前地磁匹配技术可分为基于地磁相关匹配和基于图像匹配方式.地磁相关匹配法指的是以某一个相关准则为标准,通过平移INS 指示轨迹,实现与磁基准图上的真实轨迹匹配,从而修正惯导误差.相关准则可以分为3 类[131]:1) 相似程度,如积相关法和归一化相关法;
2) 差异度,如绝对误差法、平均绝对误差(MAE)法、平方误差法和平均平方误差法;
3) 距离,如Hausdorff 距离准则.谢仕民等[132]从计算量、匹配精度和误差收敛性等角度综合比较上述几种匹配准则,结果表明MAE 法和平均平方误差法优于其他相关准则.针对上述准则易受到噪声影响的问题,GUO 等[133]提出以地磁熵作为匹配准则,抑制误匹配率,提高系统定位精度.此外有学者提出两步匹配的思路,粗匹配过程采用平均绝对误差法,在此基础上采用地磁熵作为精匹配准则,充分利用各类准则优点,提高算法的鲁棒性,但增加算法复杂度.总之,地磁相关匹配法结构简单、适用范围广且对初始误差不敏感,但算法只能平移轨迹而不能旋转.研究人员将图像处理的思想引入至地磁匹配过程中,主要代表算法包括迭代最近点(ICP)、ICCP 和地磁匹配双等值线(DICCP)等,ICCP 采用刚性变换模型,迭代逼近最近的轮廓点序列,可以同时修正惯性位置误差和航向误差[134].然而,ICCP 只能收敛到局部最优,并且容易受到初始位置误差的影响[135].SONG 等[136]提出基于地磁矢量的地磁匹配算法,在匹配区域的地磁熵信息较小或地磁等高线的变化不明显的情况下,提高匹配概率和定位精度.
3.3 地形辅助的INS 技术
随着海洋测绘技术的不断发展,基于水下地形匹配的方法被广泛研究[137-144].水下地形匹配指的是利用地形特征,限制航位推算误差.针对地形匹配特点,本部分将从水下地形构建和地形匹配算法两个关键问题展开论述.
3.3.1 水下地形构建
针对高精度和高分辨率水下地形的需求,各类型的水下地形探测技术快速发展.目前,水下地形探测设备有:激光探测、多波束探测、侧扫声纳和合成孔径声纳等[145-147].激光探测向海面发射激光脉冲,通过测量往返传播时间,计算出海底深度,具有机动性强,效率高和抗干扰性强等优点,但是测距深度浅,只适用于浅海区域探测,并且存在相对其他探测技术精度差等缺点.多波束探测利用广角度定向发射和多通道接收,收集条幅式水下地形特征,测量精度高且适用于中浅层水域.侧扫声纳利用声波散射原理,直接以图像的形式反映地形,此方法存在探测盲区问题.合成孔径声纳通过载体的运动方式,将小孔径虚拟为大孔径,生成高分辨率的水下地形图,但易受水下能见度的影响.表6 给出了相关设备的探测精度、探测深度和探测效率等技术参数.

表6 地形探测设备技术参数
3.3.2 地形匹配算法
根据地形匹配特征的差别,地形匹配算法分别为景像区域匹配方法(SMAC)和地形高程匹配方法(TEM).SMAC 通过对比量测图像和已知图像,从而获取导航信息,具有精度高的优点,但计算量大,易受环境影响,在水质混浊、光线微弱或者存在漂浮物的区域,出现匹配精度差或者错误匹配情况.因此,SMAC 适用于近距离水下环境,如AUV 对接回收过程[148].TEM 利用载体距离海底高度和海面高度,等价转换为地形高度,并与三维地形数据库匹配.TEM大体可分为2 类,即批次处理方法和递推滤波方法.批次处理方法指的是将一系列的量测数据累积到一起处理,代表算法为TERCOM.TERCOM 算法结构简单,可以忽略大初始误差影响,但实时性差且定位精度受到基准图精度、水下噪声和网格精度的影响.递推滤波方法指的是利用当前时刻量测信息和上一时刻的估计结果推测当前时刻的估计结果,代表算法为桑迪亚地形辅助导航算法,其本质是基于EKF,具有计算量小、实时性高且同时修正多维误差,但对初始误差敏感并且要求地形匹配误差符合高斯分布.由于水下地形存在畸形,地形匹配误差不再符合高斯分布,传统的KF 算法适用性不高,有学者提出基于粒子滤波和质点滤波的地形匹配算法[149-151].马腾等[152]提出一种海底地形匹配高效的质点算法,通过构建伪输入高斯过程,实现基于置信度的质点权重计算,提高匹配精度和效率.针对地形量测数据存在野值问题,PENG 等[153]提出基于Huber 估计的粒子滤波算法,通过代价函数调整粒子权重,提高匹配的鲁棒性.
1) 多传感器融合.目前,水下导航采取SINS/DVL、SINS/USBL 或SINS/重力等组合模式,若AUV 航行超出DVL 工作量程、应答器作用范围或水下地形/地磁/重力特征过于平坦,单一组合模式将失效,滤波结果将发散,严重影响AUV 执行任务.因此,为了弥补单一传感器的测量误差,采用多传感器数据融合,如SINS/USBL/DVL、SINS/USBL/LBL 和SINS/重力/地形/地磁等,获取高精度且稳定的水下导航结果.
2) 鲁棒性算法.针对水下复杂环境,量测噪声出现加性和乘性特征,需要研究鲁棒滤波算法抑制环境噪声.目前已有的鲁棒KF 算法有基于Huber 鲁棒滤波算法、最大熵鲁棒滤波算法和学生t鲁棒滤波算法,存在辅助参数难以确定和算法的复杂性强等问题,需要研究更加有效、模型简单、参数易选的鲁棒滤波方法.
3) 一体化样机研制.针对多传感器分立式安装存在浪费空间且影响小型载体稳定性的问题,研究一体化样机十分必要.一体化样机融合惯性器件、水声传感器、深度传感器、姿态传感器和数据处理模块,能够保证高集成度、易扩展性和适装性强.
本文回顾现有主流的无人装备水下导航定位方法,如DVL、包含LBL、SBL 和USBL 的水声定位和基于重力、地磁和地形匹配辅助的地球物理场匹配定位技术.介绍各类导航算法的原理和优缺点,重点阐述各种算法的关键技术,为AUV 长航时、高精度和远航程提供技术支撑.
猜你喜欢 波束滤波重力 基于HP滤波与ARIMA-GARCH模型的柱塞泵泄漏量预测农业工程学报(2022年10期)2022-08-22基于时空特征融合的水下目标波束形成方法舰船科学技术(2022年11期)2022-07-15应用于农业温度监测的几种滤波算法研究现代信息科技(2021年21期)2021-05-075G网络扫描波束规划方案探讨移动通信(2020年9期)2020-11-0660 GHz无线通信系统中临近波束搜索算法研究现代电子技术(2020年3期)2020-08-04重力之谜科普童话·神秘大侦探(2020年3期)2020-05-11重心漫谈新高考·高一物理(2016年10期)2017-07-07基于非下采样剪切波变换与引导滤波结合的遥感图像增强计算机应用(2016年10期)2017-05-12一张纸的承重力有多大?小天使·一年级语数英综合(2016年9期)2016-05-14重力与质量的比较中学生数理化·八年级物理人教版(2014年2期)2014-04-02







