非奇异快速终端滑模的分数阶迭代学习控制策略研究
时间:2023-02-28 20:05:05 来源:柠檬阅读网 本文已影响 人 
付建斌,康恺
(1.国家能源集团甘肃电力有限公司,兰州 730070;
2.成都地铁运营有限公司,成都 610066)
随着工业的发展,机械臂被广泛应用于反恐防爆、工业装配等领域,它有着十分典型的多输入多输出的复杂系统,它有着非线性、时变不确定等特点[1~2]。近年来,许多学者在机械臂轨迹跟踪的问题中使用了各种各样的算法,如:滑模算法、自适应算法、迭代学习控制算法等等。其中,迭代学习算法不依赖数学模型,且能够实现在有限时间内的完全跟踪[3]。但在实际情况中,系统总是存在各种不确定性的干扰[4],而迭代学习控制的鲁棒性差,在一定程度上影响了控制系统的稳定性。而滑模控制策略最显著的优点在于其鲁棒性好,所以能够在建模不确定性和干扰存在的情况下更好的保持控制系统的稳定性[5]。与整数阶微积分相比,分数阶微分和积分过程更具鲁棒性[6]。随着计算机技术的发展,由于分数阶控制系统由于其具有记忆性和遗传性,控制效果更具柔性,开始应用于冶金、化工、机械等工业过程[7]。目前,在工程控制领域之中,应用比较多的分数阶微积分定义形式分别有以下三种:Grunwald-Letnikov(GL)定义、Riemann-Liouville(RL)定义以及Caputo定义形式。其中,由于Caputo型分数阶微积分较其他两种来说,其形式简单,方便了许多学者的研究过程,所以得到了广泛的应用。
近年来,分数阶微积分、迭代学习控制以及滑模控制已经被广泛应用于航天、电机、机械臂等控制领域之中[8~11]。文献[12]设计了一种PDα型分数阶迭代学习算法,但并没有讨论α的取值问题。文献文献[13]为提高感应电机控制性能,根据积分滑模控制和微积分理论,提出动态分数阶滑模控制,但是忽略了滑模控制的奇异性问题。文献[14]将滑模控制算法与迭代学习控制算法相结合来提高系统的鲁棒性,但是忽略了滑模控制所带来的抖振现象。文献[15]针对一类不确定系统的跟踪控制的问题,提出了一种将RBF神经网络与干扰观测器相结合的非奇异快速终端滑模控制方法,但是滑模本质上控制具有不连续性,在实际工程运用过程中,抖振问题可能会导致系统高频振荡,导致控制系统的不稳定。文献[16]将滑模控制算法与神经网络控制算法相结合提出神经网络滑模控制,尽管在一定程度上削弱了抖振现象,但没有实现机械臂关节的完全跟踪,且神经网络控制器设计过程复杂。
基于以上文献的分析,为了实现对机械臂关节的快速稳定跟踪,本文提出了一种基于非奇异快速终端滑模的分数阶迭代学习控制策略,采用变指数幂次滑模趋近律,能够自行调整趋近律的幂次项,提高了控制系统的精度。削弱了了传统滑模控制的抖振问题,加快了系统收敛到稳定点的速度,增强了传统迭代学习控制的抗干扰能力,实现了机械臂关节的完全跟踪。图1为控制系统的结构框图。

图1 控制结构框图
n关节机械臂的动力学模型如下:
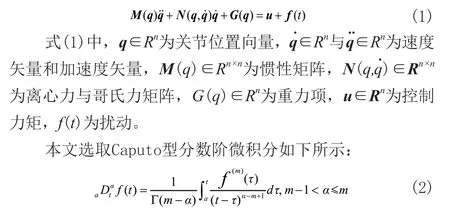
式(2)中,Γ(·)为Gamma函数。
取PDα型分数阶迭代学习控制律为:

式(3)中,L与Γ分别为比例增益矩阵与微分增益矩阵。
2.1 滑模趋近律的设计与分析
根据滑模控制的原理,滑模可达性条件只保证状态空间中任意位置的运动点在有限时间内到达滑模面,但没有对到达滑模面具体的轨迹进行约束,趋近律可以提高到达滑模面的动态质量。传统的幂次趋近律为:=−k1signa(s),k1>0,在远离滑模面s<<0或s<<0时存在趋近速度过小的问题。针对这一问题,本文提出的趋近律如式(4)所示:

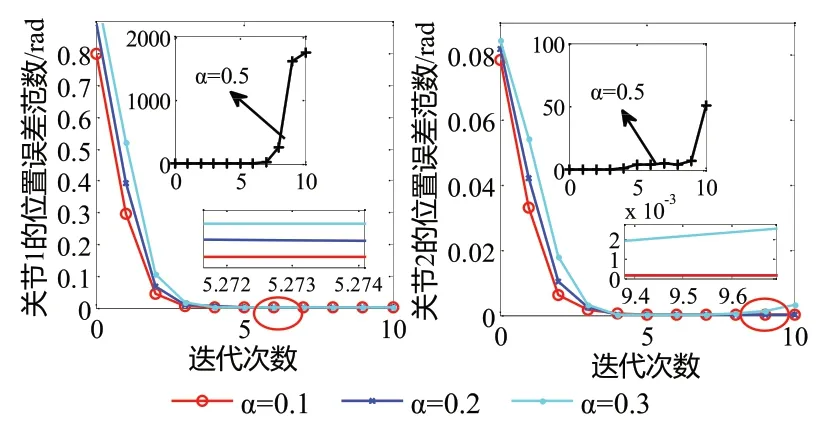
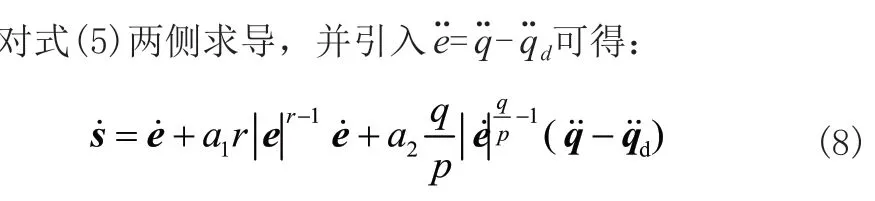
其中,0 相较于传统的幂次趋近律,式4的趋近律的幂次项是可变的,所以通过滑模面s的取值,自适应地改变趋近律中的指数项参数,从而在不同的阶段分别得到较快的收敛速率。当系统状态远离滑模面时,趋近律第一项-k1s保证系统状态快速到达滑模面。当系统状态靠近滑模面时,趋近律第二项-k2丨s丨bsign(s)保证系统稳定到达滑模面,减小了控制系统的抖振现象。 本文设计的滑模面为: 其中,r、a1、a2为正常数,q、p为正奇数,所以e,·e没有负指数项,保证滑模面没有奇异性问题。 令式(5)等于零可得: 对式(6)两侧进行积分,可得: 所以机械臂系统从滑模面到系统平衡点所需时间是一定的。 结合式(1)、式(4)及式(8)可得控制律为: 稳定性分析: 选取如下式所示的李雅普诺夫函数: 对上式求导可得: 将式(1)、式(9)代入式(11)可得: 由李雅普诺夫定理可知,因为V>≤0,所以本文设计的控制器是渐近稳定的。 则整个控制器的控制律为: 为了验证本文所提控制方法的有效性,通过MATLAB软件对系统进行仿真实验,分数阶模块建模采用FOMCON[17]。仿真对象选用二关节机械臂,模型中各矩阵的表达式为: 其中,v=14,q01=8.98,q02=8.75,g=9.8。 系统初始状态为:[q1q2q3q4]=[0310],取L=[1000;0100],Γ=[2000;0200]。k1=k2=4,b=0.5,a1=a2=0.2,r=2,q=5,p=3,迭代次数为10次。期望轨迹为q1d=sin(3t)和q2d=cos(3t)。 利用以下三种控制方法进行比较分析: 方法一:传统PD型迭代学习控制策略; 方法二:传统终端滑模控制策略; 方法三:本文所设计方法。 从本文所设计的PDα型迭代学习控制律可以看出,α的取值会影响系统的控制精度和控制效果。因此,α值的选取非常重要。下面以基于PDα型分数阶迭代学习控制为例,从位置误差范数的收敛情况来讨论α的取值。图2为在不同α值下位置误差范数的最大绝对值的收敛过程。从图2可以看出,当α的值大于0.1时,机械臂关节的误差范数会逐渐增大,特别是当值达到0.5时,误差范数急剧增加。又因为当α的值小于0.1时仿真运行时间大大增加,不利于实际情况。所以,当α的值为0.1左右时,机械臂两个关节的位置误差范数的值是最小的。因此,设置分数阶α的值为0.1。 图2 不同α值下位置误差范数的收敛过程 首先为验证所设计控制策略的性能指标,设定期望轨迹为阶跃信号,图3为三种控制策略下的单位阶跃响应曲线,表1为性能指标。由图3及表1可知,所设计控制策略满足稳态和动态性能指标。 图3 阶跃响应曲线 表1 性能指标数值 当输入正弦信号时,为验证控制器的鲁棒性,在仿真的第3s,引入一个峰值为1000,时间域度为0.1的高斯干扰,利用本文所设计控制策略通过与传统迭代学习控制进行仿真对比,图4为引入干扰后机械臂关节的位置跟踪曲线,通过比较分析得出:在引入分数阶微积分以及滑模控制策略后,迭代学习控制本身固有的抗干扰能力差的现象有所减弱,控制系统的抗干扰能力明显加强。 图4 干扰下位置跟踪误差曲线 图5为在方法一与方法三下两个关节位置误差范数收敛过程曲线,表2是随迭代次数增加而变化的位置误差范数最大绝对值的变化情况。对比可得如下结论: 表2 随迭代次数增加而变化的速度跟踪误差最大绝对值数值 (rad) 图5 位置误差范数收敛过程曲线 1)方法一下的位置误差范数最大值为0.9419rad、0.1497rad,最小值为0.0914rad、0.0135rad; 2)本文所设计方法下为最大值为0.1085rad、0.0271rad,最小值为0.0183rad、0.0092rad; 所以,在本文所设计控制策略下机械臂关节的位置误差范数值更小,收敛速度更快。 为验证所设计控制器的的削弱抖振能力,通过与传统的终端滑模控制策略进行比较分析。图6为两种控制策略下的控制力矩曲线,由图6可知,在本文所设计的控制策略下,控制系统的抖振更小,即削弱抖振的能力更强。 图6 控制输入比较曲线 图7为三种控制方法下的位置轨迹跟踪过程,其中,方法一与方法三下为10次迭代后的跟踪曲线。通过对比分析,可以得出:本文所设计的控制器可使机械臂各关节的跟踪速度显著加快,与期望轨迹更加贴近,跟踪性也能更好。 图7 位置轨迹跟踪结果比较 为提高机械臂控制精度,本文分别提出基于分数阶微积分理论、迭代学习控制以及滑模控制提出基于非奇异快速终端滑模的分数阶迭代学习控制策略,得到如下结论: 1)本文设计的控制策略与传统PD型迭代学习控制策略相比,机械臂关节的的抗干扰能力更好,即鲁棒性更强。同时,机械臂两个关节位置误差范数最大值减小了0.8334rad、0.1226rad,位置误差范数最小值减小了0.0731rad、0.0043rad,所以在本文所提方法下机械臂两个关节的跟踪效果更好,两个关节的跟踪误差更小。 2)与传统终端滑模控制策略相比,本文所设计的控制策略对抖振的削弱能力更好,收敛速度更快,即控制器更加的稳定。而在三种不同控制策略下,本文所设计的控制器使机械臂关节的位置跟踪效果更好,控制精度更好。2.2 非奇异终端滑模面的设计



2.3 控制律设计与稳定性分析





3.1 仿真参数设定

3.2 仿真结果