基于有限时间超螺旋滑模控制的船舶动力定位控制律设计
时间:2023-01-23 22:40:02 来源:柠檬阅读网 本文已影响 人 
贺广健,刘海波,宫勋,彭程,曹策
(中国科学院长春光学精密机械与物理研究所,长春 130033)
随着人类对海洋资源的不断开发以及船舶自动化技术的日渐成熟,船舶动力定位技术已经被广泛地运用在海洋作业中。船舶动力定位技术迫使船舶依靠自身的动力推进系统,来抵御风浪流等海洋环境所造成的扰动,使得船舶在海面某一固定位置或者沿着目标轨迹以一定的姿态保持航行[1-3]。动力定位技术具有不受水深限制、定位精度高与操控性强等优点,已在救助打捞船、科考船以及海洋钻井平台等领域广泛应用,是开发利用海洋工作中不可或缺的技术[4]。
船舶动力定位技术最开始采用经典的PID控制,利用低通滤波器处理高频信号,作为第一代动力定位系统取得了阶段性的成果,但存在滤波技术引起的相位滞后以及定位精度低等缺点[5]。进入20世纪70年代,采用将干扰分为高频与低频的线性二次型高斯控制,利用卡尔曼滤波技术处理高频信号,可以解决低通滤波器引起的相位滞后,被称为第二代动力定位系统,由于线性二次型高斯控制基于线性模型,但船舶动力定位模型是非线性的并且准确度不高,因此定位精度一般[6]。随着控制理论的发展,文献[7]采用自适应PID控制器,利用李雅普诺夫稳定性理论证明了船舶动力定位系统一致全局稳定,并通过仿真验证控制器的有效性。文献[8]利用了非线性模型预测控制技术,实现了船舶动力定位控制器的设计,通过仿真验证其有效性。文献[9]采用将动态面技术与矢量逆推方法相结合设计船舶动力定位控制器,控制船舶的动力定位。文献[10]基于滑膜控制算法,直接对控制输入进行设计,提出一种二阶滑膜控制算法,通过仿真验证控制器的有效性。这些方法在动力定位控制中取得了一定的成效,但在工程实践中风浪流等海洋环境对于船舶动力定位影响巨大,因此需要对风浪流等海洋环境扰动进行处理才能够获得较好的控制效果。
在20世纪90年代,韩京清[11]提出基于扩张状态观测器(Extended State Observe,简称ESO)的控制策略。ESO的基本思想是将被控系统的内部不确定项与外部干扰视为总扰动,通过设计一个理想的观测器对被控系统的总扰动进行观测,获得总扰动的估计值,在控制通道中设计前馈补偿器将可估计总扰动给予精确抵消,从而实现抗扰动的目的[12]。韩京清提出的ESO是非线性结构的,早期对于ESO的研究主要针对其理论证明[13-14]。文献[15]首次提出线性自抗扰控制,将韩京清提出的非线性结构线性化,并引入带宽思想,使得越来越多的学者关注ESO。文献[16]利用线性状态观测器估计总扰动,将线性自抗扰控制器应用于伺服控制系统,仿真实验证明相对于PID具有更好的鲁棒性。近年来,随着现代控制理论的进一步发展,有限时间控制获得越来越多的学者关注,文献[17]与文献[18]表明与非有限时间控制器相比,有限时间控制系统具有更好的抗干扰性与鲁棒性。船舶动力定位系统所受环境干扰较大,因此研究船舶动力定位有限时间控制具有重要的意义。
受上述文献启发,通过融合有限时间控制技术、扩张状态观测器与超螺旋滑模控制方法,本文提出一种基于有限时间超螺旋滑模的船舶动力定位控制策略。将船舶的未建模动态和未知时变扰动视为总扰动,并构造有限时间超螺旋扩张状态观测器实时估计总扰动。进而利用超螺旋滑模方法设计船舶动力定位超螺旋滑模控制律,取得了有限时间的船舶动力定位控制性能,同时设计保证船舶动力定位闭环控制系统的所有信号一致最终有界。应用Marine Systems Simulator工具箱进行仿真试验,结果表明所提出的控制方案的实用性。
为了便于船舶动力定位控制律设计,给出如下符号定义:

式中,χ=[χ1,…,χn]T,χi∈ ℜ,(i=1,…,n),ƛ∈(0,1),sign(·)表示符号函数。
船舶动力定位系统仅考虑纵摇、横摇和艏摇3个自由度的水平面运动,因此船舶动力定位数学模型如下[19]:
式中,η=[xyψ]T表示船舶的位置向量,由北东坐标系下的位置(x,y)和船舶艏摇角ψ组成;
υ=[uvr]T表示船舶的速度向量,由附体坐标系下的船舶横摇速度u、纵摇速度v和艏摇角速度r组成;
J(ψ)为北东坐标系与附体坐标系之间的旋转矩阵,表达式为M∈R3×3表示包含附加质量的惯性矩阵,且正定对称的;
D∈R3×3表示线性阻尼矩阵;
τ=[τ1τ2τ3]T表示船舶推进系统提供给船舶的等效合力与力矩组成的控制向量,由纵摇控制力τ1、横摇控制力τ2与艏摇控制力矩τ3组成;
d=[d1d2d3]T表示风、浪流等海洋环境对船舶的等效扰动合力及力矩向量,由纵荡扰动力d1、横荡扰动力d2与艏摇扰动力矩d3组成。
假设:
(1)船舶动力定位运动数学模型中的M与D是不确定的;
(2)船舶速度υ的变化率是有界的;
(3)由海洋环境中风浪等对船舶的扰动d是未知时变且有界的,且变化率同样是有界的。
注:由于船舶的动态性能与本身特性以及外部环境因素等均有联系,因此船舶的动态模型很难准确获得,具有较为明显的不确定性;
海洋中风浪流时常发生变化,但它们的能量是有限的,故对船舶产生的扰动也是界的,因此假设是合理的。
控制目标:考虑到动力定位船舶的动态不确定性与遭遇外界未知时变扰动情况下,构造有限时间超螺旋扩张状态观测器估计总扰动,基于此设计船舶动力定位超螺旋滑模控制律,以保证船舶的实际位置η达到并保持于期望的位置ηd=[xdydψd]T,其中 (xd,yd)为北东坐标系下的期望位置,ψd为期望的船舶艏摇角。
引理1[20]存在如下动态系统:

式中,f:D→Rn在D∈Rn在原点附近开区间是连续的,并有f(0) =0。如果存在连续方程V:D→R满足如下条件:
(1)V是正定的;
(2)存在c> 0,θ∈ (0,1),并且在ϖ⊆D原点附近的开区间有:

则原点是动态系统(2)的平衡点。调节时间函数T1可以表示为:

式中,Va(xa(t0))表示Va(xa(t))的初始值;
T1是连续的。
2.1 有限时间超螺旋扩张状态观测器设计



2.2 基于超螺旋滑模控制的船舶动力定位控制律设计及稳定性分析



3.1 控制律验证
本文采用挪威科技大学的Fossen等人针对船舶控制系统,依据船舶的数学模型开发的Simulink工具箱MSS[22]进行仿真研究。本文选择DP Motion RAO model中的供给船(Supply Vessel)为例进行仿真验证控制算法的有效性,该供给船的相关参数如表1所示。

表1 船舶模型主要参数
本文设定船舶所遭受的海浪参数如下:海浪谱的类型为ITTC双参数谱,有义波高为3 m,平均波向为30°,波浪扩散因子数值为2,对应海况等级为4级。船舶初始状态η(0 ) =[5m,5m,5°]T与υ(0)=[0,0,0]T,船舶的期望状态ηd=[0m,0 m,0°]T与υd=[0,0,0]T;
控制器的相关参数的选择如下,有限时间超螺旋扩张状态观测器部分:λ=1,β1=diag(1,1,5),β2=diag(1,1,20);
船载稳定平台超螺旋滑模稳定控制律部分:α1=diag(10,10,1),α2=diag(2,2,2)。
仿真结果如图1~图3中实线所示,性能指标如表2所示。图1为船舶状态变化曲线,表明了船舶以较快的速度趋向于期望状态ηd=[0m,0m,0°]T上,并且能够保持在期望位置附近;
图2为船舶的速度变化曲线,表明了船舶以一定速度到达期望位置后,可以保持在期望位置上,即υd=[0,0,0]T;
图3为船舶推进力和力矩变化曲线,曲线变化光滑合理符合实际需求。通过以上仿真结果验证了控制律的有效性。
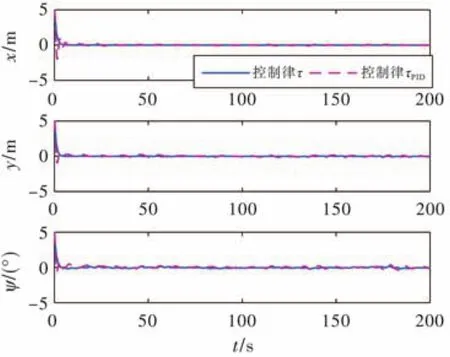
图1 海况(a)下船舶位置与艏向角曲线

图2 海况(a)下船舶速度曲线

图3 海况(a)下船舶控制力与力矩曲线

表2 控制方法性能指标比较
3.2 控制性能比较
将本文所设计的控制律与现在大部分船舶动力定位系统采用的PID控制方法进行比较。在两种不同的海洋环境下,船舶初始条件、期望位置与控制参数相同。通过仿真对两种控制方法进行比较分析,海洋环境(a)中船舶所遭遇的环境扰动与3.1节中相同,海洋环境(b)中船舶所遭遇的环境扰动的海浪有义波高为5 m,其余海浪参数与3.1节中相同。在海况(a)下先调整PID的控制参数,获得较好的控制效果,其具体参数KP=diag(1.0×106,1.0×106,1.0×107),KI=diag(1.4×103,1.4×103,1.4×103)与KD=diag(3.0×107,3.0×107,3.0×108)。
在海况(b)下超螺旋滑模控制仿真结果如图4~图6中实线所示,性能指标如表2所示。PID控制律在海况(a)和(b)下的仿真结果分别用虚线描绘在图1~图3和图4~图6中,PID控制律的性能指标列在表2中。通过图1~图6与表2可以看出,在两种不同海况下,本文所提出的控制方案的定位误差的收敛速度都明显优于PID控制,同时船舶定位的稳态误差明显小于PID控制方案的稳态误差,并且海况越大,本方案的优越性越明显。

图4 海况(b)下船舶位置与艏向角曲线

图5 海况(b)下船舶速度曲线

图6 海况(b)下船舶控制力与力矩曲线
本文考虑到海上作业动力定位船舶存在未建模动态和未知时变扰动,将船舶的未建模动态和时变未知海洋扰动视为总扰动,设计了有限时间超螺旋扩张状态观测器估计该总扰动。借助李雅普诺夫稳定性理论,证明了所设计的控制律通过选择合适的控制参数,能够使得船舶的实际位置趋向并保持在目标值上。最后,利用一艘Supply Vessel进行仿真研究验证了所提出控制方案的有效性。
猜你喜欢 海况观测器滑模 水下直升机无模型参数自适应滑模控制舰船科学技术(2022年10期)2022-06-17滑模及分数阶理论在电机控制系统中的应用大电机技术(2022年2期)2022-06-05基于滑模观测器的PMSM无位置传感器控制策略防爆电机(2020年4期)2020-12-14基于非线性干扰观测器的航天器相对姿轨耦合控制北京航空航天大学学报(2020年10期)2020-11-14基于多输入海况条件下的船舶运动模型分析价值工程(2019年36期)2019-01-11东北亚季风对船舶通航安全的影响及对策水运管理(2017年11期)2018-01-02基于滑模观测器的机翼颤振主动抑制设计北京航空航天大学学报(2017年6期)2017-11-23使用SGCMGs航天器滑模姿态容错控制北京航空航天大学学报(2017年4期)2017-11-23基于干扰观测器的船舶系统航向Backstepping 控制电子制作(2017年24期)2017-02-02EHA反馈线性化最优滑模面双模糊滑模控制北京航空航天大学学报(2016年7期)2016-11-16







