基于ADAMS的拖牵索道驱动系统建模与动力学仿真研究
时间:2023-01-21 13:30:09 来源:柠檬阅读网 本文已影响 人 
孙润业 赵嘉伟 崔高宇 张铁骥 苏 猛 万 强 刘 渊
(1.中国特种设备检测研究院 北京 100029)
(2.同济大学 机械与能源工程学院 上海 201804)
(3.吉林省特种设备监督检验中心 长春 130103)
拖牵索道是一种将游客从地势较低处运送至地势较高处的运输工具,常见于各大滑雪场,能节省游客的体力,提高游玩的乐趣,尤其适合初级滑雪者[1]。相比于架空索道,拖牵索道工作原理和结构简单,投资低廉,运营和维护成本较低,乘坐方面对游客更为友好,适用于地势高差不大、距离较短、地势较为平坦的雪道[2]。随着滑雪运动的兴起,拖牵索道的出现大大地提升了各大雪场的运能,是架空索道的一种有力补充。目前,我国的拖牵索道保有量近400条,占比约为35%,仅次于客运架空索道。
与国外相比,我国雪场的索道建设水平比较低。在技术研发方面,国外索道公司已经将计算机辅助设计广泛应用在了新技术的研发中,建立了合理的数学与力学模型并进行参数化设计,大大提高了复杂索道系统的计算效率[3]。与此同时,国外的索道公司还十分重视新材料在索道技术中的应用,例如采用合成材料代替鞍座铜衬以及使用风轮机直接驱动代替减速器等[4]。国内起步晚,缺乏科学的发展理念,自主创新能力弱,技术迭代速度缓慢,技术开发资金投入不足,制造水平较低等,成了制约我国索道行业快速发展的主要因素[5]。
为了提升我国拖牵索道的设计和校验能力,本文开展了基于ADAMS的拖牵索道驱动装置建模与仿真研究。首先应用Solidworks软件建立了驱动装置的三维模型,然后利用ADAMS仿真软件对其进行运动学仿真,最后在此基础上分析其载荷状态,利用有限元分析其强度。
1.1 三维模型的建立
动力学仿真的主要目的是验证在正常工况及恶劣工况下拖牵驱动装置的运行性能,因此可对模型进行适当简化。将拖牵索道线路上的支架、拖牵器以及迂回装置去掉,只保留钢丝绳和驱动轮之间的配合关系,通过计算理想工况下的钢丝绳两端拉力来模拟现实情况中的载荷[6]。这样能够简化系统各个部件之间的关系,便于后续动力学的分析。最终三维模型效果如图1所示。

图1 拖牵索道驱动装置的三维模型
1.2 驱动系统载荷计算
拖牵索道的载荷来源于钢丝绳的拖拽力,其运行有3种工况:
1)工况一:是在索道设备例如拖牵装置、迂回装置和支架建设好之后,装上钢丝绳,进行没有乘员和拖牵器的运行。这种情况只需考虑钢丝绳以及风载荷影响下的受力情况。
2)工况二:建立在第1种基础上,在搭建好的钢丝绳上挂载拖牵器与拖牵杆,但是没有乘客。在这种情况下系统主要的载荷包括拖牵器以及钢丝绳所带来的载荷,同时考虑风载荷的影响。
3)工况三:是最常见的情况,此时空载运行已经完成,需要进行有乘客的载荷测试。考虑乘客被拖牵运送上雪道,不需要达到规定的满载数额,只需测试在搭乘人数相对较多的工况下拖牵索道具体的载荷。这种工况下索道需要承担的载荷有钢丝绳、拖牵器和拖牵杆、乘客载荷的自重以及风压对上述3种载荷的影响。
考虑工况三是拖牵索道的一般工作状态,相对于没有考虑载荷的其他2个工况更具有代表性。因此,本文以某一典型拖牵索道为对象,对其工况三进行载荷计算及动力学分析。该拖牵索道的基本参数见表1,依据GB/T 19401—2003《客运拖牵索道技术规范》[7]及相关规范可得到表1中的计算结果。

表1 拖牵线路参数及载荷
2.1 前处理
在ADAMS中导入后的三维模型,右侧的轮系作为迂回轮以及在Cable模块建立后作为滑轮的连接体。为了便于分析,又不失一般性,对模型进行了简化处理:忽略了钢丝绳的自重,两轮之间的距离不做严格限定,去掉减速器的外壳,只保留输出轴以及必要零件,将驱动平台及其立柱合为一个部件。简化后的ADAMS模型如图2所示。
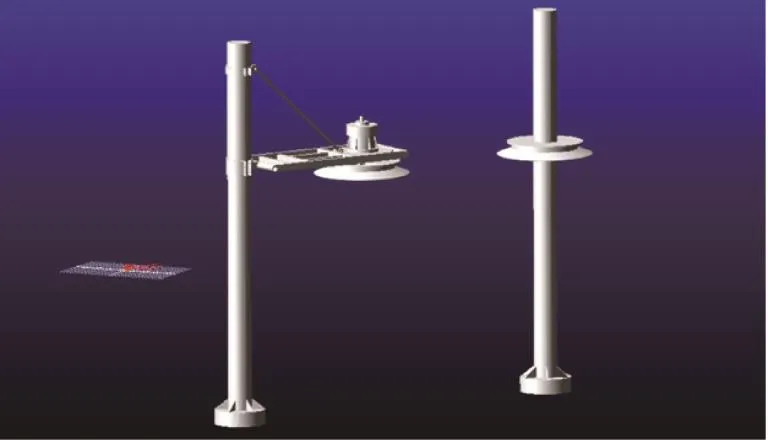
图2 ADAMS中的三维模型
在ADAMS自带的机械模块Cable中,建立钢丝绳缠绕驱动轮的绳索系统。Cable模块有2种分析模式,一种是简化法,另一种是离散法。简化法忽略了绳索的自重以及绳索与设定滑轮之间的摩擦力,计算步骤较少,能够快速得出仿真结果,适合模型较为简单的仿真系统。而离散法通过将绳索等效为串联起的球体来模拟现实中的受力情况,离散法计算钢丝绳的自重以及与滑轮的摩擦,反映了钢丝绳的柔性特点,能够更好地分析振动情况对系统载荷的影响,但是计算更加复杂,所耗费的仿真时间更长。2种模式都要求滑轮在初始状态时处于同一水平面上,而本次设计中拖牵索道线路具有比较小的角度,因此可以忽略该角度的影响,将模型进一步简化,驱动轮只受水平方向作用力。
绳索组的定义包括4个方面,分别为定义锚点、定义滑轮属性、定义滑轮位置以及定义绳索。其中,锚点用于将绳索与拖牵杆连接,设置个数为2;
模型中包括驱动轮和迂回轮,二者尺寸和运行方式相同,因此只需要定义一个滑轮属性即可,包括滑轮的宽度以及滑轮槽的深度、角度等,相关设置如图3所示。

图3 前处理

图3 前处理(续)
2.2 运动副以及载荷的添加
在ADAMS运动学以及动力学仿真中运动副以及载荷的添加是至关重要的一步,关系着仿真模型能否按照预定的运动方式进行模拟。本次仿真中由于已经对三维模型进行了简化,因此装配关系比较简单。首先需要添加驱动平台立柱与地面之间的固定副,如果没有固定副可能会在仿真过程中由于受到重力而无法固定。由于此前已经用布尔运算将驱动站立柱和驱动平台合成一个整体,因此二者之间的运动关系不需再添加。驱动轮的主要驱动方式为输出轴直接连接驱动轮,通过平键带动驱动轴进行转动,因此需要给输出轴添加转动副以及相对于平键的实体接触,再添加平键和驱动轮的实体接触。
在ADAMS中构建运动副有3种模式,分别为1个物体、2个物体1个位置和2个物体2个位置。在本次仿真中主要采用第2种即2个物体1个位置的方式。对于固定副就是确定2个固定的物体以及固定点,而转动副就是确定相对转动关系以及转动中心。可以在定义输出轴的转动副之后通过将绳索模块生成的滑轮连接在输出轴上来模拟驱动装置的输出过程。为了保证仿真能够顺利进行,还需定义拖牵杆与驱动轮之间的接触关系。ADAMS中有相关的功能,通过接触力来仿真当2个实体接触时产生的应力以及位移,只需点击2个物体然后设置相关参数,例如密度、弹性模量即可。
为了验证绳索模块在拖牵索道中的可行性,首先建立了更加简化的三维模型,保留驱动轮、迂回轮和输出轴的模型,通过滑轮与输出轴的固定副来表示二者的位置关系。又添加了模拟拖牵杆,在拖牵杆模型上施加上文计算的最终简化效果如图4所示。

图4 拖牵索道简化模型
按照前文所述绳索模块的使用方法,在2个轮分别添加转动副,在左边的轮添加驱动,转速为30 r/min。添加对于锚点、滑轮属性、滑轮位置以及绳索性质的设定,更加简化的三维模型建立完成。
在上述处理之后即可进行后处理,在仿真交互控制界面中进行仿真分析,可以分析模型在运行过程中各个部件的受力情况和运动轨迹,并通过曲线分析拖牵索道的运行情况。对模型中的各个零件进行运动学分析,即分析运行过程中各个零件的位置、速度、加速度变化,主要包括驱动轮、迂回轮、拖牵杆和绳索4个部分。考虑篇幅问题,本文着重对驱动轮和减速器输出轴的运动进行仿真分析。
3.1 驱动轮运动学分析
驱动轮为整个拖牵索道提供动力,图5为驱动轮质心在x轴方向的位移,可以看出在5 s内位移近似成正弦曲线,说明拖牵轮在绕y轴进行圆周运动。5 s内驱动轮质心的速度同样成近似正弦曲线,由于驱动轮做恒角速度运动,其轮边缘在x轴方向的线速度分量符合图中所示变化规律。说明驱动轮的运动为定角速度圆周运动,这与现实情况相一致。

图5 驱动轮质心在x轴方向的位移
图6为驱动轮质心在x轴方向的加速度变化曲线,可以看出驱动轮的质心在初始时为0,随后极速上升,约0.1 s后变化较平缓,这对应了启动阶段由于电机的带动,驱动轮从静止迅速开始运动,加速度迅速增大,随后在运行逐渐平缓之后加速度减小,在3.0 s时加速度的方向发生了变化,说明质心的运动方向与圆周运动相关。通过驱动轮的运动学分析,可以验证减速器的设计和选型,保证了减速比的正确性。

图6 驱动轮质心在x轴方向的加速度
3.2 输出轴的动力学分析
在拖牵杆上施加表1中所计算的钢丝绳拉力,用以模拟拖牵索道重载上行与轻载下行时的工况,从而验证减速器输出轴是否能满足该工况下的载荷要求。图7为输出轴所受的弯矩,可以看出在x轴方向所受水平力在0到17 500 N之间波动,经校核小于钢丝绳所受到的最大水平力拉力,也小于输出轴所能承受的最大径向力,表明输出轴在重载上行、轻载下行工况下能满足载荷需求;
图中水平力出现波动是由于在ADAMS中导入三维模型时参考坐标系与系统默认方向不一致,钢丝绳所受拉力在x方向的分量上会出现一定变化。图8为输出轴所受的扭矩,可以发现输出轴所受扭矩在启动时最高达到15 000 N.m,随后在运行过程中基本稳定在5 000 N.m,经校核与计算结果基本一致,说明输出轴能承受水平力对危险截面的扭矩。图9为输出轴在z方向所受的扭矩,可以看出在启动时输出轴所受扭矩最大约为2 000 N.m,随后在1 000 N.m左右波动,经校核该结果小于输出轴的额定扭矩。经上述动力学分析,可以判断减速器在该工况下可以安全运行。

图7 输出轴在x方向所受的弯矩

图8 输出轴在x方向所受的扭矩

图9 输出轴在z方向所受的扭矩
1)根据拖牵索道的基本参数,结合设计手册及国家相关标准确定了系统的基本数据,并依此分析了3种不同工况下索道驱动系统的载荷,为验证索道系统的设计提供了方法支撑。
2)对拖牵驱动系统以及减速器进行了合理的简化,保留了需要进行分析的主体部分,提高了ADAMS的分析效率。
3)在进行运动学分析的过程中,重点对拖牵驱动轮以及拖牵杆的运动情况进行了分析。通过对于二者位移、速度、加速度曲线的绘制验证了拖牵索道能够在所施加的驱动条件下正常运行,为拖牵索道的设计提供了一种验证手段。
猜你喜欢 驱动轮索道滑轮 基于正交试验的整车驱动轮滚动阻力因素分析汽车实用技术(2022年5期)2022-04-02电驱动轮轮毂设计及有限元分析汽车实用技术(2022年5期)2022-04-02一种新型掘进机行走驱动轮设计方案中国新技术新产品(2020年4期)2020-05-05固定抱索器索道吊椅拆装工具车劳动保护(2018年8期)2018-09-12长江索道迎来30岁生日红岩春秋(2017年11期)2017-12-07移动平台及包含移动平台的行李箱科技创新导报(2016年27期)2017-03-14坐华山索道爱你(2017年6期)2017-02-23







