融合速度信息的机械臂自适应轨迹跟踪控制方法
时间:2022-12-08 19:35:06 来源:柠檬阅读网 本文已影响 人 
张蕾,刘宇航,王晓华,黄晶晶
(1.西安工程大学电子信息学院,710048,西安;2.西安工程大学陕西省人工智能联合实验室,710048,西安;3.西安交通大学自动化科学与工程学院,710049,西安)
机械臂因其操作灵活、重复定位精度高等优点被广泛应用在工业生产、太空探测、深海探索等领域。高精度的机械臂轨迹跟踪控制需要精确的系统动力学模型、各关节连续准确的位置与速度信息,而参数摄动、未建模动态、外界扰动以及关节传感器测量误差等因素使得机械臂轨迹跟踪控制策略的研究极具挑战[1]。
在机械臂轨迹跟踪控制领域已取得的研究成果包括:PID与PID衍生的控制算法[2-3]、滑模变结构控制[4]、自适应控制[5]、反步控制[6-7]、鲁棒控制[8-9]、神经网络控制和模糊控制[10]等。文献[11]提出改进神经网络PID控制器,神经网络学习PID输入输出的状态信息特性补偿机械臂建模误差与不确定干扰,并对PID参数进行调整,该方法主要考虑外部干扰对机械臂控制精度的影响,但是没有考虑动力学模型中存在参数不确定性;文献[12]针对机械臂模型中参数不确定性与干扰问题,提出自适应滑模控制方法,设计自适应律对参数不确定性和无法观测的干扰进行补偿,采用新型趋近律构造滑模控制器,该方法降低了抖振现象对轨迹跟踪控制性能的影响,但是控制精度并未有效提高。反步法作为非线性系统控制设计的有力工具,在机械臂轨迹跟踪控制领域也取得了很多研究成果。文献[13]提出基于干扰观测器的机械臂收缩反步控制方法,采用非线性观测器对系统模型不确定项和未知外部干扰部分进行观测,并采用反步控制方法设计了系统的约束控制。文献[14]提出基于滑模控制的自适应模糊反步控制方法,将机械臂动力学模型转换为两个一阶系统,使用模糊网络对建模误差进行逼近,通过自适应方法确定外部干扰的上限,最后利用滑模控制方法解决自适应模糊反步控制器中“计算爆炸”的问题。
控制策略在应用到实际机械臂时,需要机械臂关节角度、角速度等变量的可靠精确的信息。当前文献大多没有考虑控制器中速度信息的来源。机械臂安装有位置传感器与转速计,机械臂的角速度既可以通过位置传感器的差分获得,也可以通过转速计测量获得。由于受到内部噪声影响,传感器或转速计的测量值一定存在误差,使用单一传感器无法保证状态信息的可靠性,使得机械臂轨迹跟踪控制精度受限。状态信息融合思想多用于移动机器人确定自身的位置和姿态[15]。为提升移动机器人速度控制的精度与稳健性,文献[16]利用非线性优化方法对单目相机、里程计以及惯性测量单元(IMU)的数据进行融合,提高了移动机器人运动状态的估计精度;文献[17]提出一种基于分布式概率最大似然估计的多传感器信息融合方法,使用卡尔曼滤波器将接收到的极坐标测量信息转换为笛卡尔坐标下的信息,用于移动机器人、四旋翼无人机的位置定位,该定位方法在高测量噪声下,仍能保证位置和速度信息的可靠性。为获取精确的串联机械臂末端位姿,文献[18]将姿态传感器与视觉传感器进行融合测量,实现对各个传感器的优势互补,从而设计出一种简易、精确的机械臂末端位姿测量方法。
针对上述问题,本文采用反步控制方法为机械臂系统设计控制律,并构造参数自适应律估计动力学模型中具有不确定性的参数;使用信息融合方法将位置传感器差分值与速度测量值进行融合,为控制器提供准确可靠的速度信息;提出一种多传感器信息融合的机械臂参数自适应轨迹跟踪控制方法(backstepping adaptive control method for manipulator under multi-sensor information fusion,MIF-BAC),实现了精度高、稳定性好的轨迹跟踪控制。
根据拉格朗日定理,考虑黏滞摩擦力、动摩擦力、外部干扰,本文所研究的双关节机械臂的动力学方程可以描述为[19]
(1)

τt=τ+τd+τi
(2)
经过上述简化,此时双关节机械臂动力学模型为
(3)
本文的控制目标是设计反步自适应控制器,多传感器信息融合为控制器提供速度信息的最优估计;机械臂关节实际运动角度q跟踪期望角度qd,轨迹跟踪误差尽可能趋近于0;同时设计自适应律,对不确定的动力学参数Cn、Gn进行估计。


假设2状态x1(t)、x2(t)可测。
假设3期望轨迹xd为已知函数,其一阶导数与二阶导数存在并连续有界。


2.1 MIF-BAC控制器设计
步骤1根据假设1~假设3,将式(3)写为如下状态空间形式
(4)
设期望轨迹的关节角跟踪误差为
e1=x1-xd
(5)
期望轨迹的角速度跟踪误差为
(6)
将x1的一阶导数x2视为系统输入信号,为其设计虚拟控制信号为
(7)
式中:k1∈Rn×n是待给定的对称正定常数矩阵,定义e2=x2-α1,构造如下形式的Lyapunov函数
(8)
对其求导可得
(9)

步骤2构造第2个Lyapunov函数为
(10)
对式(10)求导可得
(11)
将式(4)(7)(9)代入式(11),可以得到含有控制总输入力矩τt的Lyapunov函数的一阶导数
(12)
基于Lyapunov稳定性理论设计反步控制律,如下式所示
Mne1-k2Mne2
(13)


(14)
Cn、Gn通常是有界的慢变常数,其变化速率可以视为0,即
(15)

Mne1-k2Mne2
(16)
扩增参数估计误差,重新定义Lyapunov函数为如下形式
(17)
其一阶导数为
(18)
将式(16)代入式(18)得
(19)
(20)
(21)
将式(21)代入式(16)中,得到最终总控制输入力矩的表达式为
(22)
2.2 基于多传感器信息融合的速度估计

(23)
(24)

(25)
由式(23)、式(24)得
(26)
(27)
将式(26)等式右侧写为如下形式
(28)
(29)


(30)

(31)
由2.1节步骤1中式(5)~式(8)可得
(32)
e2=x2-α1
(33)
(34)
将式(33)与式(34)代入式(32)中可得
(35)
式(31)写为如下形式
(36)
由式(33)可得
(37)
(38)
将式(36)写为
(39)

为验证所提MIF-BAC方法的有效性,在Matlab/Simulink平台仿真的基础上使用机械臂控制平台进行轨迹跟踪控制实验。
首先比较融合速度(测量速度与预测速度融合)、测量速度(转速计测量值)、预测速度(位置传感器差分值)对本文设计的反步自适应控制器性能的影响,并对融合速度下控制器的不确定参数进行估计;其次在融合速度下对比MIF-BAC控制器、反步控制器、自适应控制器的控制性能。
4.1 3种速度下MIF-BAC控制器的性能



(a)关节1

(a)关节1
表1与表2是MIF-BAC控制器在3种速度下的平均跟踪误差与平均输入力矩,以跟踪误差及其方差、输入力矩及其方差为评价指标,跟踪误差反映控制精度,输入力矩体现控制稳定性。

表1 MIF-BAC控制器在3种速度下关节角的平均跟踪误差及其方差

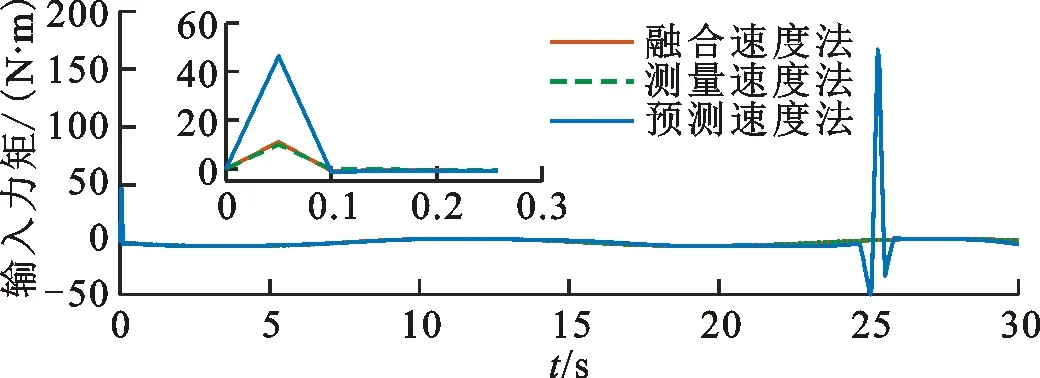
表2 MIF-BAC控制器在3种速度下平均输入力矩及其方差
图3是采用3种速度方法下关节1与关节2期望轨迹与实际轨迹曲线;图4是3种速度方法下反步自适应控制器的跟踪误差曲线;图5是3种速度方法下关节1与关节2的输入力矩曲线。

(a)关节1
由表1数据结合图4、表2数据结合图5,可得采用融合速度信息的MIF-BAC控制器能够有效减小轨迹跟踪误差,提高控制精度;控制输入力矩稳定,能够保证系统平稳运行。

(a)关节1
(a)关节1

图6 本文所设计的方法对机械臂动力学模型中不确定参数的估计响应曲线
4.2 MIF-BAC控制器性能验证

图7为3种控制方法下关节2的轨迹跟踪曲线。由图7(b)可见,反步控制方法与自适应控制方法在集总干扰的影响下均存在周期性的跟踪误差。MIF-BAC方法不存在跟踪误差。图7(c)中由于在工作空间中关节角的跟踪误差会使得末端位置产生偏移。综上所述,本文所提方法有着更好的控制性能。
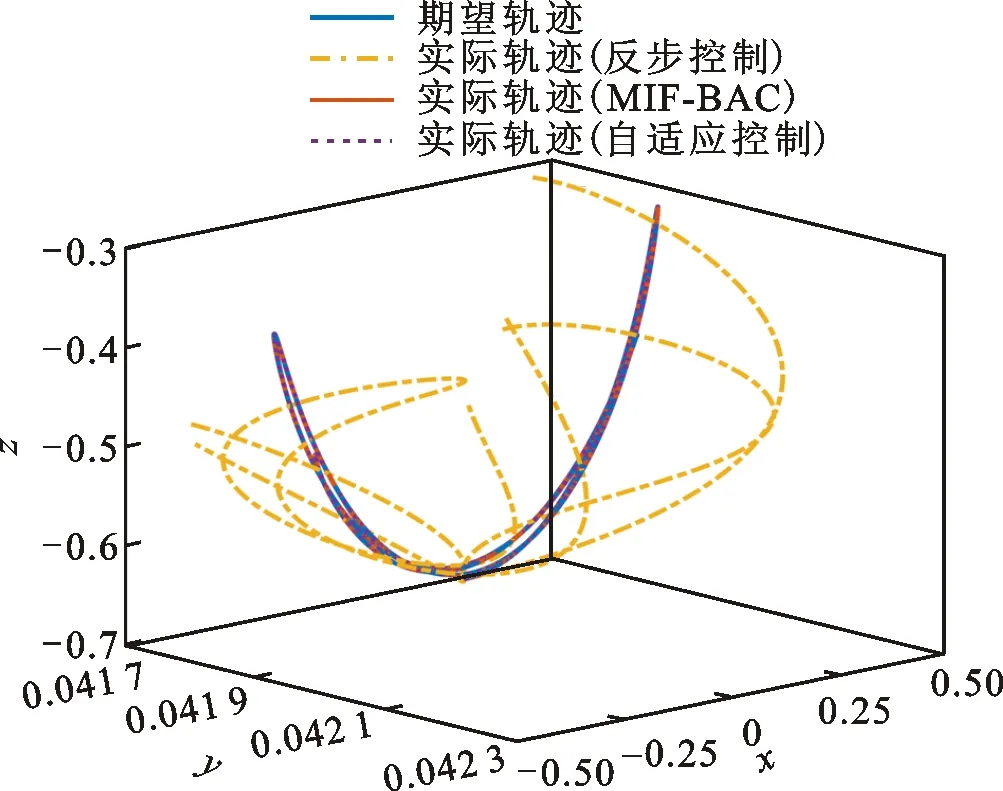
(a)末端位置曲线
4.3 机械臂平台实验
采用实验室与中科深谷搭建的机械臂平台对所提MIF-BAC方法的有效性进行验证,实验平台主要结构如图8所示。机械臂平台由上位机、数字信号处理(DSP)控制箱以及机械臂本体组成;机械臂本体由无框力矩电机、谐波减速机、增量式光电编码器、绝对值角度编码器以及伺服驱动器构成。

图8 机械臂轨迹跟踪控制实验平台

MIF-BAC方法的控制律如式(22)所示,控制器参数如5.1节所述,反步控制中的机械臂动力学模型参数C=1.2,G=4.5,M=2。图9给出了关节2的运行情况。

(a)期望轨迹与实际轨迹
由图9可以看出,在自适应控制方法下跟踪曲线拟合度低、跟踪误差大、收敛速度慢,关节转向时电流有明显波动;反步控制下跟踪曲线拟合度高、跟踪误差较小但是不收敛,关节转向时电流波动较大;MIF-BAC方法可以保证机械臂关节角度能很好地跟踪期望轨迹,跟踪曲线拟合度最高、跟踪误差最小且收敛速度最快,关节转向时电流波动小,意味着机械臂关节输入力矩运行平稳波动小,相比自适应控制误差降低了50%,相比反步控制误差下降了30%。
综合以上分析,机械臂模型参数不确定的情况下,本文提出的MIF-BAC方法控制性能良好,在保持小的跟踪误差的同时能够保证机械臂系统的平稳运行。
本文针对因模型参数变化以及不够精确的关节速度信息导致机械臂实际运行时控制性能下降的问题,以反步控制方法为框架,引入参数自适应律对不确定参数的取值做出估计,完成机械臂控制器的设计;并向控制器中提供采用信息融合方法获取的更可靠与更精确的融合速度信息。仿真与实验结果表明,使用融合速度信息的反步自适应控制方法有更高的控制精度与更强的稳定性。
猜你喜欢 轨迹控制器误差 三转子式比例控制器设计与内泄漏分析舰船科学技术(2022年11期)2022-07-15南京溧水电子3款控制器产品中国自行车(2022年3期)2022-06-30解析几何中的轨迹方程的常用求法中学生数理化(高中版.高考数学)(2022年4期)2022-05-25北斗导航种萝卜百米误差仅2厘米今日农业(2021年17期)2021-11-26轨迹读友·少年文学(清雅版)(2020年4期)2020-08-24轨迹读友·少年文学(清雅版)(2020年3期)2020-07-24基于NFV的分布式SDN控制器节能机制网络空间安全(2019年8期)2019-03-18隧道横向贯通误差估算与应用智富时代(2018年5期)2018-07-18隧道横向贯通误差估算与应用智富时代(2018年5期)2018-07-18精确与误差中学生数理化·七年级数学人教版(2016年6期)2016-05-14







