基于机动检测排序的AGIMM跟踪算法研究
时间:2022-12-06 12:55:04 来源:柠檬阅读网 本文已影响 人 
王文涛, 甘旭升
(空军工程大学空管领航学院,西安 710000)
随着无人机技术的发展,无人机系统频谱早已不再局限于军事用途,应用领域覆盖了人们的生产、生活、消费及娱乐,一些低门槛的无人机进入大众视野。但无人机的普及也给空域运行安全带来了巨大风险,特别是在一些大型机场附近地区,因一些用户违规使用无人机的行为出现航班大面积疏散备降的事件时有发生。例如,2017年成都双流机场因无人机扰飞事件出现大量航班紧急备降[1]。而事后能够成功捕获肇事者的案例却少之又少,其主要原因还在于针对重要目标附近的低空监管监控手段缺乏,不能对违规飞行目标实施连续的跟踪监视。因此,发展对“低、慢、小”目标的跟踪技术,尤其是针对小型无人机的跟踪查证技术,对提升低空空域的运行安全具有较大的现实意义。
小型无人机的运行速度较慢、质量轻,但机动性很强,与常规的有人机或导弹的运动特性存在较大差异。常规航空器除做直线运动外,进行的机动转弯具有显著的“圆弧”特性。而一些小型无人机由于质量轻、机动能力强、转弯弧度较小,机动方式更为自由。当前的目标跟踪算法可分为单模型算法和多模型算法。单模型算法主要是基于匀速运动和匀加速运动模型[2],协同转弯(Coordinated Turn,CT)模型[3],Singer模型[4],当前统计模型[5]和Jerk模型[6]等对移动目标进行轨迹估计。但单模型算法的适用对象必须是严格按照模型假设的模式运动,算法才具有有效性,否则会存在目标丢失的现象,这在很大程度上限制了模型的应用[7]。1965年,MAGILL[8]首次提出多模型(Multiple Model,MM)算法用以解决单模型算法的缺陷,但此时的模型由于缺少相互间的交互,在跟踪过程中仍有较大的误差;
1988年,BLOM等[9]首次提出了交互式多模型(Interactive Multiple Model,IMM)算法,其被广泛应用于目标跟踪的相关研究,但IMM算法仍受限于所选取的模型集,并不具有自适应性,特别是对转弯机动的目标跟踪效果欠佳。为使算法具备较好的自适应能力,在IMM算法基础上一系列改进算法被提出,并取得较好的目标跟踪效果。文献[10]提出了一种变结构的IMM算法,可自适应地调整模型集,在减少多模型计算量的同时提高了跟踪精度;
文献[11]针对协同转弯模型的转弯率严重依赖先验知识的缺陷提出了一种自适应网格IMM(Adaptive Grid IMM,AGIMM)算法,能够在跟踪过程中不断调整转弯率,提升了对机动目标的跟踪精度;
文献[12]使用BP神经网络训练IMM算法中转弯模型对转弯率的判别能力,从而实现转弯率的自适应跟踪,但扰动对BP神经网络的训练及目标的跟踪都有较大影响,仍缺乏应对扰动的有效措施;
文献[13]基于模糊逻辑机动检测算法提升AGIMM算法的收敛速度,有效提升了原有AGIMM算法的跟踪效率,但在转弯率的跟踪方面性能提升有限,且扰动的设置较小,与高机动目标的运动特征之间存在偏差;
文献[14]提出一种基于机动判别的变结构AGIMM算法,可自适应地改变模型概率转移矩阵,用以解决对临近空间高超声速目标的跟踪问题,从仿真结果来看,角速度收敛效果较好,但受扰动的影响较为显著;
文献[15]提出了AVSIMM算法用于跟踪高超声速再入滑翔目标,利用残差信息能够实现转弯率跳转网格的自适应和运动模型的自适应,但模型仍局限于二维空间内;
文献[16]同样利用AGIMM模型实现对临近空间目标的跟踪,但对模型的改进主要通过拓展卡尔曼滤波算法的应用来实现,并未有效弥补传统IMM算法转弯率跟踪性能不良的缺陷。
综上所述,在对空中目标的跟踪过程中,IMM算法应用较广,机动转弯时的模型切换对跟踪效果影响较大。但传统IMM算法对转弯机动的自适应能力并不理想,特别是对无人机这类质量轻、机动性强的目标会存在较大的跟踪误差。本文基于AGIMM算法设计针对消费级小型无人机的目标跟踪算法,结合目标机动判别方法和置信度排序的策略,提升AGIMM算法对转弯率的收敛速率和应对扰动的能力,以及目标的跟踪效率和精度。
在目标跟踪过程中,对转弯机动的跟踪一直是难点,而AGIMM算法的构建以协同转弯模型为基础,可自适应调节对目标转弯率的估计。一些中小型无人机,其机动特性并不像有人作战飞机会做一些“筋斗”或螺旋机动,大部分机动都为水平转弯机动,但转弯率大小变动幅度较大。可假设无人机在水平面内实施转弯机动,转弯时速度标量不变,角速度用ω表示。则离散化后的状态方程可表示为
X(k+1)=FX(k)+V(k)
(1)

(2)
式中,T为离散时间间隔。
噪声的协方差矩阵为
(3)
式中:当ω>0时,目标向左转弯,当ω<0时,则向右转弯,当ω=0时,则模型变为匀速运动模型;
q为系统噪声方差。
低空探测平台可以是传统多普勒雷达,也可以是红外/光电雷达,或是基于广播式自动相关监视(ADS-B)的监控平台。但ADS-B系统是合作式的监视系统,对于一些非合作的目标无法进行有效跟踪监视,因此,本文以传统多普勒雷达为例构建量测模型,设量测方程为
Z(k+1)=H(k+1)X(k+1)+W(k+1)
(4)
(5)

AGIMM算法基于多个转弯模型构建,每一个转弯模型都具有一个特定的转弯率,3个转弯模型的转弯率由小到大排列,并且间隔相等,具体表示为ω(k)={ω1(k),ω2(k),ω3(k)},ω3(k)-ω2(k)=ω2(k)-ω1(k),且ω∈[ωmin,ωmax],各模型转弯率对应的概率为μ(k)={μ1(k),μ2(k),μ3(k)}。将ω1(k)称为左跳模型转弯率,ω2(k)称为中间模型转弯率,ω3(k)称为右跳模型转弯率。初始模型集的转弯率通常设置为{ωmin,0,ωmax}。在每一轮的滤波完成后,按照后验概率更新各模型的转弯率,具体更新方法可参考文献[17-18]。
传统AGIMM算法对目标转弯率的跟踪必须基于一定量的历史残差数据,会存在收敛速度慢的现象,转弯率阈值越大,搜索耗时也越长。若目标连续进行机动,且转弯率差异较大,则会出现位置估计误差较大、目标丢失的现象。基于机动判别的转弯率计算方法是通过计算点迹的残差信息来判断目标是否发生机动,若判断为发生机动,则抽取部分离散点迹,以离散点的转弯率预测目标当前转弯率,但该方法同样存在机动误判的可能。因此可与原有AGIMM算法相结合,提升转弯率的收敛速度,改善跟踪效果。
3.1 目标机动判别
目标机动判别主要是基于模型预测的残差信息。在第k次滤波结束后,AGIMM算法的3个模型会分别得出3个残差向量v1,v2和v3,分别对应3个后验概率值μ1,μ2和μ3。以后验概率值最大的模型i的残差为判别标准,求其距离函数为
(6)
式中:vi(k)为模型i在k时刻的残差向量;
Si(k)为模型i在k时刻的残差协方差矩阵。
Di(k)是服从量测维数值的χ2分布。通过查询χ2分布表可设置机动转弯的门限值M。若Di(k)>M,则判别为发生机动,否则判别为未发生机动。在判定为发生机动的情况下,重新根据历史点迹计算离散转弯率,对原有转弯率进行更新,并参与后验概率的计算和排序,引导AGIMM算法的转弯率收敛计算。若判定为未发生机动,则维持机动判别模型的转弯率,同样参与后验概率的计算和排序。M的取值需综合考虑检测的灵敏度和扰动的影响。若取值过小,则在大扰动的影响下会产生误判;
若设置过大,则灵敏度不足,转弯率跟踪会延迟。因此,需根据具体应用实际和环境因素合理调试,具体数值可参考文献[14]。正是因为机动检测正确率受扰动影响较大,使得该方法的适用性受到限制。
3.2 离散转弯率计算
在AGIMM算法中,网格的自适应调整主要是通过残差信息的判别来实现。以残差信息最小转弯率作为中间模型,左跳和右跳模型均起到对中间模型的修正作用。但在网格的调整过程中,在扰动作用下,若左跳或右跳模型明显偏离真实值、产生较大残差时,修正的效率就会降低。对此,本文增加了一种离散转弯率计算模型,辅助修正原有AGIMM模型的中间模型。由于隔点取值,扰动对转弯率计算的影响有限,当AGIMM算法中的网格模型因检测失误产生较大残差时,可由离散转弯率计算模型降低机动检测失误的影响,从而起到提升算法鲁棒性的效果。
某一点的曲率可以反映该点的转弯率,对此,可以通过计算离散曲率的方法来提升跟踪目标转弯率的准确性。本文利用计算离散曲率的方法辅助AGIMM算法对转弯率进行收敛。通过对部分历史估计点迹的提取,一方面可以降低噪声的影响,另一方面可以计算轨迹的曲率[12,19]。历史点迹需要隔点提取,如图1所示。

图1 离散点的提取方法
点B处的离散曲率KB为[17]
(7)
式中:LAB,LBC,LAC分别为线段AB,BC,AC的长度;
DABC为三角形ABC的有向面积。有向面积的算式为
(8)
式中:i,j,k均为单位向量;
(xa,ya),(xb,yb)和(xc,yc)分别表示点A,B,C的坐标。利用计算的离散曲率可进一步计算出目标转弯率,即

(9)

3.3 基于排序的模型结构调整
基于离散曲率的转弯率计算方法需要利用一定的历史估计航迹点,因此对一些转弯率持续变化的机动动作估计会因为历史估计点迹的影响存在较大偏差,但基于机动判别的转弯率估计方法又能及时弥补基于离散曲率的转弯率计算方法,利用IMM模型正好可以实现模型间的互补。对此,本文提出了MDS-AGIMM算法,通过引入排序机制,更好地实现模型之间的交互。
在第k次滤波完成以后,根据AGIMM模型和离散曲率计算模型得出转弯率发生概率值分别为μ1(k),μ2(k),μ3(k)和μ4(k)。其中,前3项为AGIMM模型得出的转弯率后验概率,第4项为离散曲率计算模型得出的后验概率,依据转弯率的大小确定转弯率的收敛方向,一共有4类情况。
3.3.1 max(pk)=μ4

(10)

(11)
式中:α为调节因子,影响转弯率的收敛速度,通常取1/2;
G0为最小网格间隔。若D4(k)≤M,则未发生机动,转弯率更新为
(12)
(13)
(14)
式中,s1为无效模型的门限值,说明该方向的转弯率搜索误差较大,应当向网格中心靠拢。此时
(15)
3.3.2 max(pk)=μ1
此时为左跳模型概率最优,同样先依据概率值进行排序。若D1(k)>M,判定为发生机动,模型转弯率更新方式按式(11)计算,模型间距调整参数变为
(16)
若D1(k)≤M,则未发生机动,中心模型转弯率更新方式按式(13)计算,左跳和右跳模型更新方式为
(17)
此时网格调整方式与式(16)相同。
3.3.3 max(pk)=μ2
此时为中间模型概率最优,同样先依据概率值进行排序。若D2(k)>M,则判别为发生机动,转弯率调整与式(11)相同,模型间距调整参数为
(18)
若D2(k)≤M,则未发生机动,转弯率调整方法及网格调整方法按式(13)~(16)计算。
3.3.4 max(pk)=μ3
此时为右跳模型概率最优,同样先依据概率值进行排序。若D3(k)>M,判定为发生机动,模型转弯率更新方式按式(11)计算,模型间距调整参数变为
(19)
若D3(k)≤M,则未发生机动,中心模型转弯率更新方式按式(13)计算,左跳和右跳模型更新方式为
(20)
此时网格调整方式与式(16)相同。
3.4 模型概率转移矩阵的调整
概率转移矩阵同样基于每一次滤波结束后的残差信息进行自适应调整,残差越小,则模型转移的概率越高,其他模型也具有更高概率向该模型转移。当目标发生机动、残差数值发生变化时,概率转移矩阵也随之调整,模型集往残差小的模型转移概率增大。更新方式为
δi j(k)=Λj(k)/Λi(k)
(21)
(22)
(23)
式中:Λj(k)为k时刻模型j滤波后的似然函数;
pi j(k)为k时刻模型i到模型j的转移概率。但依据这样的模型转移概率调整仍有缺陷,当某一个模型概率值过大或过小时,模型跳出会变得困难,无法及时转移,因此要对式(23)得出的概率值做出修正,限制概率的最大与最小值。修正算式如下。
若pik>pmax,则
(24)
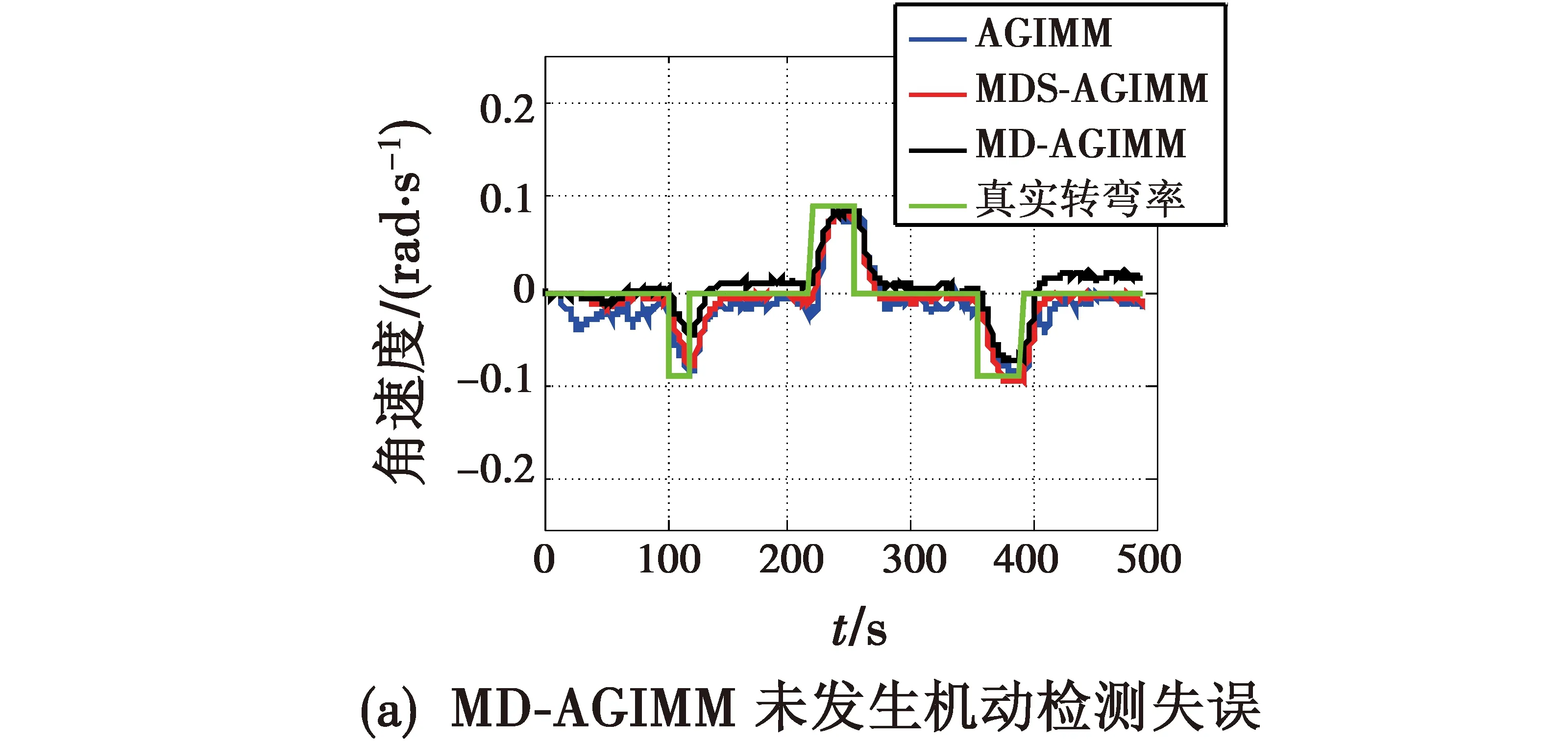
若pil (25) 本文目标跟踪的主要对象为民用中小型无人机,重点是加强对机场等重要目标上空的监控,难点是目标状态转移概率的获取。虽然当前国内外各类无人机型号较多,但运动特性差异不大。在实际应用中,可通过对各类型无人机的历史四维航迹信息进行统计,得出先验的状态转移概率值,然后通过对目标的实时跟踪不断修正目标的状态转移概率。 4.1.1 农林作业或地质勘探轨迹(轨迹一) 机场周边地区一般地处郊区,地势平坦,多为平原或田野,开发程度较低,会有一些农林作业或地质勘探的中小型无人机飞行需求。将该类作业目标作为跟踪目标进行分析。无人机初始位置为(0 m,0 m,0 m),初始速度为(0 m/s,5 m/s,0.5 m/s),目标飞行分为7个阶段。第1阶段t∈[0,100](单位为s,下同),无人机以初始速度匀速飞行; 4.1.2 无人机航拍飞行轨迹(轨迹二) 在一些消费级无人机群体中,运动摄影飞行占据极大的比例,不但普通民众有这一飞行需求,部分政府机构或企业同样存在这一需求。但因为大众对飞行管制类法规意识的缺乏,有可能在一些重要目标上空违规飞行,需要对这一类违规飞行目标进行跟踪监视。这一类无人机由于设备较为简单,且操控员能力素质有限,飞行轨迹较为自由,缺乏规律性,转弯机动方式各不相同。针对这一现状,设置飞行轨迹二的初始位置和状态与轨迹一一致,将飞行分为两个阶段。第1阶段t∈[0,100],无人机以初始速度沿直线匀速飞行; (26) 无人机航拍飞行轨迹如图3所示。 图3 无人机航拍飞行轨迹 算法性能的比较使用均方根误差(RMSE)作为指标分析,算式为 (27) 对构建的虚拟飞行场景进行目标跟踪仿真,模型的参数设置如表1所示。 表1 模型参数设置 4.3.1 轨迹一 通过对比角速度的跟踪情况可体现出算法性能的优势,如图4所示。 图4 角速度跟踪情况对比(轨迹一) 从图4(a)中可以看出,3类模型虽均具备转弯率跟踪的能力,但在应对扰动方面AGIMM模型处于劣势,这是因为AGIMM模型对转弯率的跟踪完全依据网格模型的调整,而网格自适应调整的效果受扰动影响较大,不具备调整方向的检测能力。MD-AGIMM模型[13]和MDS-AGIMM模型均加入了转弯检测机制,通过残差距离函数的计算,将一些门限值以内的转弯率变动作为扰动处理,不进行转弯率调整,由此提升了模型的鲁棒性。但MD-AGIMM模型仍然存在转弯机动误检测的概率,在一些扰动较大的情况下会发生机动的误判,且偏离后缺乏修正机制,如图4(b)所示。通过离散转弯率计算和排序机制的引入可弥补MD-AGIMM模型机动判断失误并提高失误下修正的能力。从仿真曲线的对比中可看出,本文提出的MDS-AGIMM算法在角速度的跟踪上比AGIMM和MD-AGIMM算法具有更好的准确度,鲁棒性也更好。轨迹一RMSE值的变化如图5所示。 图5 跟踪性能对比(轨迹一) 从水平方向的目标路径跟踪效果上看,本文设计的MDS-AGIMM算法比AGIMM算法精度更高,相对MD-AGIMM算法也有一定提升。但本文对算法的改进主要体现在水平转弯机动过程中对转弯率的自适应跟踪,在垂直方向上的跟踪主要基于卡尔曼滤波算法,因此3类模型效果基本一致,在此不再以图文形式展开分析。对模型进行100次蒙特卡罗仿真计算,得出X,Y,Z方向上距离的RMSE值如表2所示。 表2 距离RMSE值对比 从表2中可以看出,算法对跟踪精度的提高主要体现在X和Y方向上,Z方向则几乎一样。 4.3.2 轨迹二 轨迹二重点考察算法对连续变化的角速度的跟踪性能,角速度跟踪情况如图6所示。从图6中可以看出,一定情况下对于连续变化的角速度,MD-AGIMM和MDS-AGIMM算法均具有较好的转弯率跟踪效果和鲁棒性。但由于MD-AGIMM算法仍然存在机动误判的概率,对于转弯率的跟踪性能显著弱于MDS-AGIMM算法,如图6(b)所示。对于RMSE值对比则与轨迹一情况类似,在此不进行重复论述。 图6 角速度跟踪情况对比(轨迹二) 对于空中“低、慢、小”目标的水平机动跟踪监视一直是当前低空空域管控的难点。传统多模型算法能够通过模型间的交互很好地提升目标的跟踪精度,但由于目标机动性能无法预先得知,对于处于连续机动中的目标跟踪精度有限。AGIMM算法的提出解决了转弯率的自适应跟踪问题,但在扰动影响下,跟踪精度会有影响。对此,本文加入了离散转弯率的计算模型,并通过排序及时剔除残差较大的模型。通过这样的处理可以使模型具有更好的鲁棒性。通过对中小型无人机的典型作业路径的模拟,分别验证了算法对间断性转弯机动和连续性转弯机动的飞行路径都具有较好的跟踪能力,尤其是对转弯率的跟踪更为准确,相较于传统的AGIMM模型及其改进模型具有更好的鲁棒性。4.1 目标运动轨迹
第2阶段t∈(100,118],目标以转弯率-5°在水平面内转弯;
第3阶段t∈(118,218],目标继续匀速飞行;
第4阶段t∈(218,254],目标以转弯率5°在水平面内转弯;
第5阶段t∈(254,354],目标沿直线匀速飞行;
第6阶段t∈(354,390],目标以转弯率-5°在水平面内转弯;
第7阶段t∈(390,490],目标沿直线匀速飞行。无人机作业飞行轨迹如图2所示。
第2阶段t∈(100,400],无人机初始转弯率为5°,并按照变化的转弯率盘旋上升,转弯率变化算式为
4.2 性能判别指标

4.3 对比分析