基于近邻算法的无人机采集森林数据航迹路线的规划
时间:2023-04-15 16:10:04 来源:柠檬阅读网 本文已影响 人 
王晓东,杨昆
(1.河南九域腾龙信息工程有限公司, 郑州 450000;
2.郑州科技学院 信息工程学院, 郑州 450064)
随着低功耗[1]、微型传感器的迅速发展,无线传感网络(Wireless Sensor Networks, WSNs)已在军事和民用等领域广泛应用[2]。在这些应用中,传感节点收集检测区域内的数据信息,再经数据样本采集、处理和传输,使控制中心能够掌握区域环境的实况。这类应用特别适宜于无人值守或者恶劣环境的监测[3],如森林防火、煤矿检测。有效地收集数据是基于WSNs应用的关键,传统的收集数据方法是由WSNs内节点自行组网,并通过单跳或者多跳方式将数据传输至控制中心。由于多数传感节点是由干电池供电,节点的能量有限。传统的收集数据方法消耗了节点的大部分能量,易出现能量空洞[4]。据此,研究人员在WSNs中采用移动节点收集网络内节点数据,如移动机器人、小车和无人机(Unmanned Aerial Vehicles, UAV)。因机动性好,部署灵活,基于UAVs的WSN数据收集机制受到广泛关注[5-9]。例如,Chen等[5]研究基于UAV协助的数据收集算法。该算法采用非正交多址接入(Non-orthogonal multiple access, NOMA)策略,并将节点组建成NOMA群,并在UAV位置、功率控制约束条件下,最大化网络吞吐量。数据收集轨迹规划是基于UAV辅助WSN数据采集的关键。Zhan等[10]研究证实:最优的数据收集轨迹是由连通线段组成。先建立数据收集轨迹优化模型,再利用凸优化求解获取次优解。此外,Hu等[11]研究表明,UAV性能由UAV的数据收集和传输过程共同决定,而这2个过程又受到UAV路径影响。然而,上述研究工作只关注到UAV路径规划问题,没有考虑到传感节点的能量问题。Yang等[12]考虑了传感节点充电时间问题,并利用遗传算法UAV的最优锚点和停留时间。尽管上述研究工作充分利用了UAV在空中收集数据的速度快、无线信号覆盖范围大等优势,但是其没有考虑无线能量传输(Wireless Power Transfer, WPT)策略。由于传感节点是由干电池供电,并且即使电池能量消耗尽,也不便更换电池,节点的工作寿命有限。部署UAVs也只是降低节点能耗速度,并不能从根本上解决节点储能的有限问题。利用WPT策略,使无人机向节点传输电能,可有效地补充节点能量,延长节点的工作时间。UAVs的机动性好,其返航充电站充电。一方面,延长UAV的续航时间,另一方面,补充能量后可继续为监测区域内的节点补给能量。
本研究以检测森林异常数据为应用场景,通过UAV收集已部署森林区域内的节点数据, 研究单个UAV的航迹规划问题,即UAV的移动轨迹。UAV在收集节点数据时,需移动至节点上空,并以悬停方式收集节点数据。因此,如何规划UAV的航迹是提高数据收集效率的关键因素之一。
在规划UAV航迹时考虑2项约束条件:①每个节点都需被遍历,即在单条航迹路径中,UAV需遍历每个节点;
②确保UAV能够返航到充电站,一旦UAV的剩余能量小于阈值,就返充电站充电。其中阈值等于UAV返航到充电站所消耗的能量。规划UAV航迹的目标:基于上述2项约束条件,最小化UAV航迹路径,降低数据收集时间。为此,本研究提出基于近邻算法的无人机数据采集航迹规划算法(NNDC)。先基于节点被遍历、UAV有能量返航能量的约束条件下,建立路径最小化路径的模型,再利用近邻算法求解,获取最小化UAV航迹路径。性能分析表明,NNDC算法缩短了路径,降低了数据收集时间。
考虑森林异常数据检测场景。在森林区域内部署多个传感节点,这些传感节点收集区域数据,如温度数据、非法生物入侵等异常事件[13],网络模型如图1所示。

图1 网络模型Fig.1 Network model
网络由N个传感节点和一个无人机构成。采用确定性方式在目标区域内(e×e)部署N个传感节点,其中e为边长。假定N个传感节点位置为已知信息。由集合N={s1,s2,…,sN}表示。i∈N表示节点索引号。传感节点以固定周期感知环境数据,再将数据传输至UAV。用G=(N,T,A)表示网络模型,其中N表示顶点,其对应网络中的节点数;
T=[Tij]为权重矩阵,其中Tij表示顶点i与顶点j连线的权重;
A={(i,j)|i,j∈N,i≠j}表示2顶点间的连线(边)集。
此外,在网络区域部署一个UAV的充电站。当UAV的电量不足,其将返到该充电站充电。为简化表述,用S0表示充电站。
NNDC算法旨在满足能量约束条件和UAV遍历所有节点的条件下,最小化UAV完成任务的时间。为此,先阐述节点和UAV的能耗模型。
2.1 UAV向节点的无线输电

(1)
式中,ti表示si需要从UAV采集能量的时间。
2.2 UAV的能耗
UAV的能耗主要由2部分组成[15]。
(2)

(3)
Ep的定义见公式(4)
(4)


(5)
因此,UAV的能耗(EUAV)可表述为
(6)
2.3 目标问题的构建
NNDC算法通过优化UAV的航迹路径,减少收集所有传感节点所需的时间。因此,可构建如公式(7)所示的目标问题
(7)
式中,dij表示节点si与节点sj间距离。
为了保证UAV在任意一条路径r∈R需遍历每个节点,且只遍历一次,构建公式(8)的约束条件
(8)
同时,确保UAV在每条r∈R中航迹中,只遍历一次从顶点i与顶点j连线,需构建公式(9) 的约束条件

(9)
最后,对UAV在每条路径所消耗的能量进行限制,使其不超过其可储存的最高能量Emax。
(10)
实质上,公式(7)的目标问题是规划UAV的航迹问题。为了消除子环路径,采用Miller-Tucker-Zemlin(MTZ)约束进行子环消除。作为有效的子环消除约束条件,MTZ被广泛应用于车辆路径规划问题。为此,对约束条件进行修改。
i≠j,∀r∈R。
(11)


(12)
此外,UAV的每条路径r∈R必须包含S0(充电站)。因此,先生成K个S0的复制点,并将其加入节点集,即形成新的节点集N′=N∪K,其中K表示K个S0的复制点所形成的集合,即K={N+1,…,N+K}。相应地,边集A也被扩展,即A′={(i,j)|i,j∈N′,i≠j}。
为了保证每条航迹路径均遍历一个S0点,形成公式(13)的约束条件
(13)
最后,形成见公式(14)的目标函数P1(包括公式(8)、公式(12)、公式(13),下面不再列出)
(14)
P1问题是典型的行商问题(Travel Salesman Problem, TSP)。而TSP问题为NP-complete问题[16]。因此,P1问题也是NP-hard问题。为此,采用近邻算法,规划UAV的航迹。

(15)

对于任意一条路径r∈R,UAV从S0开始,先寻找离其最近的节点作为下一个遍历点。假定sk∈N是离S0最近的节点。因此,将sk∈N加入路径r,即Tr←{s0}∪{sk},其中Tr表示路径r的节点集。UAV移动至节点sk后,就开始向其传输能量,随后,收集该节点数据。UAV再更新自己的能量
(16)


下面给出基于近邻算法的UAV轨迹规划过程的算法。
该算法的输入为:
(1)充电站S0离网络内所有节点的距离,即{d0i}i∈N。
(2)各节点间距离,即{dij}i∈A2。

初始阶段,令d←0;EUAV←Emax;r←1;Tr←{S0};Nr←φ;N′←N。

4.1 仿真环境
利用MATLAB软件建立仿真平台,分析NNDC算法的性能。在200 m×200 m区域内以确定性方式部署N个传感节点。充电站S0位于200 m×200 m区域中心。部分仿真参数见表1。

表1 仿真参数Tab.1 Simulation parameters
选择3个同类的算法作为参照。
(1)基于距离排序的UAV航迹规划(Distance-Sorting Trajectory Planning of UAV, DSTP)。在DSTP算法中,先依据节点离充电站距离的大小,从近至远排序。其中充电站就是监测区域的中心位置,且是UAV的初始位置。然后,UAV再依据各节点序值,依次遍历。
(2)随机服务(Radom Service, RS)算法。在RS算法中,UAV以随机方式收集节点的数据,即随机移动。
(3)利用分支定界法直接求解目标函数,记为BABS。该方法能够获取最优的航迹,但是该算法的复杂度很高。
4.2 性能分析
将UAV收集所有节点的数据称为一项任务。UAV完成单项任务的时间越短,表示路径越优。分析节点数随任务的执行时间变化。图2给出UAV执行50次任务时完成任务的平均时间,以下简称任务平均时间。由图2可知,任务平均时间随节点数的增加而呈线性增加。原因在于节点数越多,UAV在执行每次任务需要收集的节点数据越多。因此,执行任务时间就越多。此外,相比于RS算法和DSTP算法,提出的NNDC算法降低了执行任务时间。原因在于NNDC算法利用近邻算法,优化了UAV收集数据的路径。BABS算法执行任务时间最短。这主要因为BABS算法采用穷搜索法建立了遍历所有节点的最优路径。然而,由于复杂度高,BABS算法只能执行14个节点的任务。

图2 任务平均时间随节点数变化情况Fig.2 Average mission time varies with number of nodes
分析UAV可存储的最大能量Emax对任务平均时间的影响,如图3所示。其中节点数为14。由图3可知,任务平均时间随Emax的增加而下降。原因在于:Emax越大,UAV存储的能量越足,其返往充电站充电的次数越少,这利于缩短节点遍布节点路径。此外, BABS算法具有最低的任务平均时间,并且当Emax大于600 J,其保持常数。这意味着,当Emax足够大时,BABS算法只需一条路径就能遍布网络中所有节点,无须中途返回充电站充电。相比于RS算法和DSTP算法, NNDC算法的任务平均时间仍保持显明的优势。

图3 任务平均时间随Emax变化情况Fig.3 Average mission time varies with Emax
再分析NNDC算法在每轮节点数据收集所产生的路径数。路径数越少,说明UAV往返充电站的次数越少,能够以低能耗方式收集节点数据。图4给出节点数为14个时的路径数随Emax的变化情况。由图4可知,Emax越大,每轮收集节点数据所需的路径数越少。这意味着UAV在收集节点数据时,充电次数越少。当Emax达到650 J时,NNDC算法所需的路径数逼近于BABS算法所需路径数。

图4 路径数随Emax变化情况Fig.4 Average number of tours varies with Emax
最后,分析30轮数据收集中,UAV在每轮中所消耗的能量,如图5所示,Emax=600 J,N=20。一轮是指UAV收集遍历所有节点,并收集所有节点的数据。由图5可知,随着轮数增加,UAV的能耗在增加,原因在于最初节点可利用储能工作,但随着轮数增加,节点需要从UAV采集更多能量,换而言之,UAV需要向节点补给更多能量,这就增加了UAV的能耗。相比于RS和DSTP算法,NNDC算法降低了能耗。这归功于NNDC算法优化了收集数据的路径,减少飞行时间。
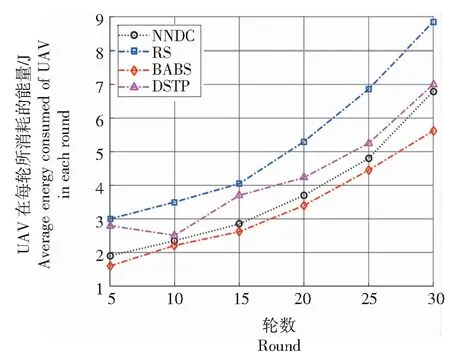
图5 UAV平均每轮所消耗的能量Fig.5 Average energy consumed of UAV in each round
针对无线传感网络的数据收集问题,提出基于近邻算法的无人机数据采集航迹规划算法(NNDC)。NNDC算法利用无人机的机动性、高空特性,收集节点数据。同时,考虑到节点能量有限问题,NNDC算法通过无人机向节点补给能量。本研究针对森林数据异常数据收集的应用前景,利用无人机收集节点数据;建立数据收集时间最小化的目标函数,再利用邻近算法规划UAV遍历节点数据的次序;
考虑到节点的能量有限问题,允许UAV利用WPT向节点传输能量。性能分析表明,相比于RS和DSTP算法,NNDC算法缩短了数据收集时间。








