欠驱动两自由度机械臂LQG/LTR控制
时间:2023-04-25 08:45:05 来源:柠檬阅读网 本文已影响 人 
徐玉龙, 王学林, 张磊, 王鹏
(齐鲁工业大学(山东省科学院)自动化研究所/山东省机器人与制造自动化技术重点实验室, 济南 250014)
欠驱动系统是控制输入维数小于自由度维数的一类系统[1],其节约能量、降低造价、减轻重量、收缩体积、增强系统灵活性等特点,使其在无人机、机器人等诸多重要领域有着广泛的应用[2-3]。欠驱动机械臂是一种典型的垂直欠驱动机械系统[4],由两个机械臂组成,第一个机械臂(肩关节)有驱动单元,为主动臂;第二个机械臂(肘关节)无驱动单元,为欠驱动臂;在运动范围内,仅有有限个平衡点。在欠驱动机械臂平衡点控制方面,中外许多学者已经开展了多方面的研究,采用的主要控制方法有混合控制[5]、比例积分微分(proportional integral derivative, PID)控制[6]、无源控制(passivity-based control, PBC)[7]、线性二次型调节器(linear quadratic regulator, LQR)控制[8-10]和滑模变结构控制(sliding mode variable structure control,SMC)[11-13]等。PID控制器具有使用简单、调节方便等优点,但是其控制精度相对较低,对不稳定平衡点的控制不够精准。张亚军等[6]提出了未建模动态及其未知增量补偿驱动的非线性PID控制方法,应用于欠驱动机械臂平衡控制系统,消除了系统非线性特性的影响,但该方法采用自适应神经网络的模糊推理系统对未建模动态增量进行估计,需要进行大量充分的网络训练,实时性会随着控制器复杂度的增加越变越差。Wu等[7]提出了一种傅里叶变换与智能控制算法相结合的欠驱动机械臂控制策略,定义一个与控制扭矩相同的周期函数,通过求解该函数的傅里叶级数得出控制器,根据角动量定理和粒子群优化算法来求解常数项和谐波项,来实现对系统的有效控制,但该扭矩周期函数难以定义,且需要进行复杂的调试。LQR[8-9]作为一种稳定控制方法,其设计便利,适用于多输入多输出(multiple-input multiple-output, MIMO)线性系统,最早由Block应用于欠驱动机械臂系统。Huynh等[10]建立五连杆欠驱动机械臂数学模型并线性化,将LQR控制方法成功应用于欠驱动机械臂系统,但当LQR应用于复杂的非线性或强耦合系统时,其抑制噪声干扰性能较差。滑模变结构控制[11-13]方法是一种非线性控制方法,适用于欠驱动等耦合性较强的一类系统。Huynh等[11]将分层滑模应用于欠驱动机械臂,利用李雅普诺夫不等式寻找控制参数之间的关系,通过遗传算法求解满足条件的滑模面参数,成功使系统稳定在期望位置。史玲玲等[12]提出了基于可变增益的滑模控制器,通过引入可变增益,该增益可根据系统的不确定性和运动状态进行调整,使得该控制器具有较强的鲁棒性,克服了传统滑模控制存在的低精度问题,提高了机器人位置控制精度。郭文东等[13]提出了一种基于反演法的新型轨迹跟踪控制策略,采用分流技术设计运动学控制器,干扰观测器和自适应滑模相结合设计动力学控制器,克服了速度跳变与精度问题,但滑模控制方法到达稳定的时间较长。另外滑模变结构控制方法运用时需要设计滑模面和趋近律,其设计需要一定控制经验,切换滑模面时常存在高频抖震现象,不利于系统的稳定控制。上述控制方法主要侧重于平衡点控制算法的研究,未考虑随机噪声对平衡点控制的影响。
线性二次型高斯控制[14](linear quadratic Gaussian control, LQG)方法是一种基于状态观测器的线性最优控制方法,能有效处理系统建模不确定和状态变量不能全部直接观测且观测数据有附加噪声干扰的线性系统控制问题,其以良好的鲁棒性和解耦特性,使得该控制方法在多变量控制系统设计中得到广泛应用,具有很高的工程应用前景,但状态观测器的引入将使系统的稳定裕度减小。为此采用回路传输恢复[15](loop transfer recovery, LTR)技术,恢复后的系统稳定裕度可以逼近LQR控制。本文研究采用具有回路传输恢复的线性二次高斯(the linear quadratic gaussian control with loop transfer recovery, LQG/LTR)控制方法,设计欠驱动机械臂系统平衡控制器,抑制复杂环境下不明噪声干扰,实现欠驱动机械臂不稳定平衡点的镇定控制。
1.1 动力学模型
系统模型如图1所示。

m1、m2为连杆质量;θ1、θ2分别为连杆1与水平线之间的夹角和连杆2与连杆1之间的夹角;l1、l2为连杆长度;c1、c2为连杆的质心距;τ1为作用在连杆1上的控制力矩图1 欠驱动机械臂模型Fig.1 Model of underactuated manipulator
利用Newton-Euler方程可得到系统的动力学方程为

(1)

(2)

(3)

(4)

(5)

(6)



G(Θ)]
(7)
当欠驱动机械臂系统处于平衡位置时,主动臂与欠驱动臂的角速度和角加速度均为0,式(7)变为

(8)
式(8)中:g为重力加速度。


(9)
1.2 欠驱动机械臂系统线性化

(10)
式(10)中:

(11)

(12)

(13)
(14)
1.3 欠驱动机械臂系统稳定性分析

2.1 LQG最优控制器设计
假设被控对象的数学模型为

(15)
式(15)中:Γ为常系数矩阵;ω(t)和ν(t)为互不相关的白噪声信号,分别表示模型的不确定性和输出端的观测噪声,假设这些信号是均值为零的Gaussian,具有W=E[ω(t)ωT(t)]≥0,V=E[ν(st)νT(t)]≥0,E[ω(t)νT(t)]=0统计特性,其中W为ω(t)的协方差矩阵,V为ν(t)的协方差矩阵。
LQG控制就是寻找最优反馈控制规律,使得

(16)


为积分环节;Σ为求和环节;γ(t)为系统参考输入;G(s)为被控对象;和y(t)分别为系统估计输出和系统观测输出图2 LQG控制系统结构图Fig.2 Structure block of LQG control system
被控对象传递函数G(s)与控制器传递函数矩阵K(s)分别为
G(s)=C(sI-A)-1B
(17)
K(s)=Kr(sI-S+BKr+KfC)-1Kf
(18)
最优控制输入矩阵Kr和KF增益矩阵Kf分别表示为

(19)

ATPr+PrA-PrBR-1BTPr+Q=0
(20)
PfAT+APf-PfCTV-1CPf+ΓWΓ-1=0
(21)
式(21)中:Γ为可调参量矩阵。
2.2 回路传输恢复(LTR)方法
回路传输恢复方法(LTR)是一种用于解决部分状态可观测系统控制问题的控制技术,其基本的设计思路是设计KF估计器并选取适当的KF增益Kf,使线性二次型高斯(LQG)闭环控制系统的开环传递函数可以尽量去趋近相对应系统的LQR闭环控制系统的开环传递函数,恢复后的系统有着接近LQR控制方法的优越性能,且具有良好的噪声干扰抑制能力。LQG/LTR方法可以有两种方法去实现,一种是采用输出端恢复,另一种是采用输入端恢复[14-15],本文研究中采用前者,具体步骤如下。
(1)根据给定的状态方程设计KF估计器。选择合适的传感器噪声协方差矩阵参数和系统过程噪声协方差矩阵参数W和V,使得KF回比函数GKF=C(sI-A)-1Kf的奇异值曲线满足要求。
(2)设计LQR控制器。经过不断地调节q的取值,让输出端的回比函数G(s)K(s)奇异值曲线逼近KF回比函数GKF=C(sI-A)-1Kf。G(s)K(s)=Kr(sI-A+BKr+KfC)-1KfC(sI-A)-1B。恢复后的系统,有更好的鲁棒性,其增益裕度大,具有不少于60°相对裕度。
3.1 LQG/LTR控制器设计
选取控制对象为欠驱动机械臂系统,设计LQG/LTR控制器,欠驱动机械臂系统模型参数为:p1=0.030 8 kg·m2,p2=0.010 6 kg·m2,p3=0.009 5 kg·m2,p4=0.208 6 kg·m2,p5=0.063 0 kg·m2。
由上述参数可以计算出系统系数矩阵为

(22)

(23)


图3 开环系统伯德图Fig.3 Open-loop-system bode diagram

图4 恢复曲线图Fig.4 Recovery curves chart
3.2 仿真分析
验证LQG/LTR不稳定平衡点控制系统的镇定能力,使用MATLAB/Simulink进行仿真,设置仿真时间为3 s,系统的采样周期设置为0.001 s,重力加速度取g=9.81,输入为γ(t)=0。仿真结果如图5~图9所示。

图5 LQG/LTR的两种初始偏离角度仿真图Fig.5 Simulations of two initial deviation angles for LQG/LTR
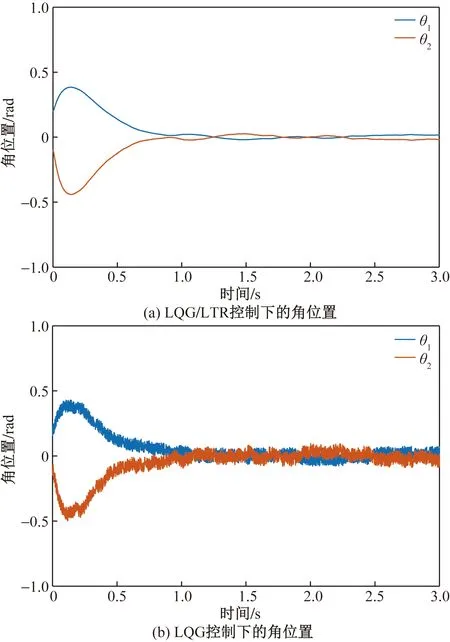
图6 LQG/LTR和LQR在噪声(ω=0.05)下的仿真图Fig.6 Simulations of LQG/LTR and LQR under noise (ω=0.05)

图7 LQG/LTR和LQR在噪声(ω=0.1)下的仿真图Fig.7 Simulations of LQG/LTR and LQR under noise (ω=0.1)

图8 LQG/LTR和LQR角速度仿真图Fig.8 LQG/LTR and LQR angular velocity simulations

图9 LQG/LTR和LQR力矩仿真图Fig.9 LQG/LTR and LQR torque simulations
针对复杂环境下,欠驱动机械臂不稳定平衡点稳定控制中存在的系统过程噪声和观测噪声干扰问题,采用LQG/LTR控制方法设计了平衡点镇定控制器,并在不同的初始条件和噪声干扰下进行了仿真试验,使该欠驱动系统快速稳定地镇定在不稳定平衡点。得出如下结论。
(1)在面对复杂环境下存在的不明干扰时,LQG/LTR控制相较于LQR控制鲁棒性更强,且有出色的抑制噪声干扰性能,能够显著减少系统过程噪声干扰和传感器观测噪声对控制系统的影响。
(2) LQG/LTR控制对欠驱动机械臂系统的平衡调节、暂态稳定和干扰抑制等方面均有良好的控制效果,控制性能优于LQR,对于较大的噪声干扰也有着出色的抑制能力,具有较好的鲁棒性和稳定性。
(3)LQG/LTR方法可以解决复杂环境下系统过程噪声和传感器观测噪声等干扰所带来的系统失稳问题,为欠驱动机械臂在复杂环境下的控制设计提供了一种新的控制方法,具有一定的工程应用前景。
猜你喜欢平衡点滑模驱动基于模糊PI控制的驱动防滑仿真系统分析汽车实用技术(2022年7期)2022-04-20屈宏斌:未来五年,双轮驱动,砥砺前行房地产导刊(2020年11期)2020-12-28轨旁ATC系统门控柜接收/驱动板改造铁道通信信号(2019年4期)2019-10-10基于组合滑模控制的绝对重力仪两级主动减振设计中国惯性技术学报(2019年6期)2019-03-04探寻中国苹果产业的产销平衡点烟台果树(2019年1期)2019-01-28PMSM调速系统的自学习滑模控制测控技术(2018年4期)2018-11-25并网逆变器逆系统自学习滑模抗扰控制测控技术(2018年3期)2018-11-25电视庭审报道,如何找到媒体监督与司法公正的平衡点传媒评论(2018年7期)2018-09-18基于S3C6410的Wi-Fi驱动移植实现通信电源技术(2016年1期)2016-04-16在给专车服务正名之前最好找到Uber和出租车的平衡点IT时代周刊(2015年7期)2015-11-11







