一种自动苹果去皮去核及分瓣一体机设计
时间:2023-03-23 08:05:04 来源:柠檬阅读网 本文已影响 人 
聂小春,敖智超,朱洪雷,高 琴
(1.广州工程技术职业学院 机电工程学院,广东 广州 510925;
2.深圳市感恩网络科技有限公司,广东 深圳 518129;
3.北京科技大学 高等工程师学院,北京 100089)
苹果是常见的一种水果,其营养价值非常高,除了直接食用,还被大量用来榨汁或制作成水果罐头。如何快速且卫生处理水果成了必需解决的问题。已有的文献设计了手摇式单果削皮机[1]、多果半自动削皮机[2]、构造复杂的大型苹果削皮机[3]以及全自动苹果削皮去核一体机等[4]。手摇式和半自动式耗费人力物力,果肉损失大,而构造复杂的削皮机又非常的笨重,体积庞大,不宜推广,缺乏创意[4],削皮去核一体机无分瓣功能。针对此,设计了一种自动苹果去皮去核及分瓣一体机,该一体机生产效率高、价格适宜、安全性高、占地面积不大。
本设计的自动苹果去皮去核及分瓣一体机驱动源采用直流减速电机,包括投料四分板推动驱动、旋转主轴驱动、左右移位丝杠驱动以及升降模块驱动。为了实现苹果从投料到自动去皮去核及分瓣的功能,将其分解设计成七大功能模块:投料功能模块、矫位功能模块、主轴插刀功能模块、去皮功能模块、去核分瓣功能模块、升降功能模块、左右移位功能模块。根据生产要求采用PLC 及行程开关对其整个生产过程实施精确控制,工人只需要把苹果放入投料装置中,后续加工就能自动完成,降低了危险事故发生率,极大减少了机械伤害,保障了人身安全,同时也降低了劳动强度。
设计的自动苹果去皮去核及分瓣一体机的结构组成如图1 所示。
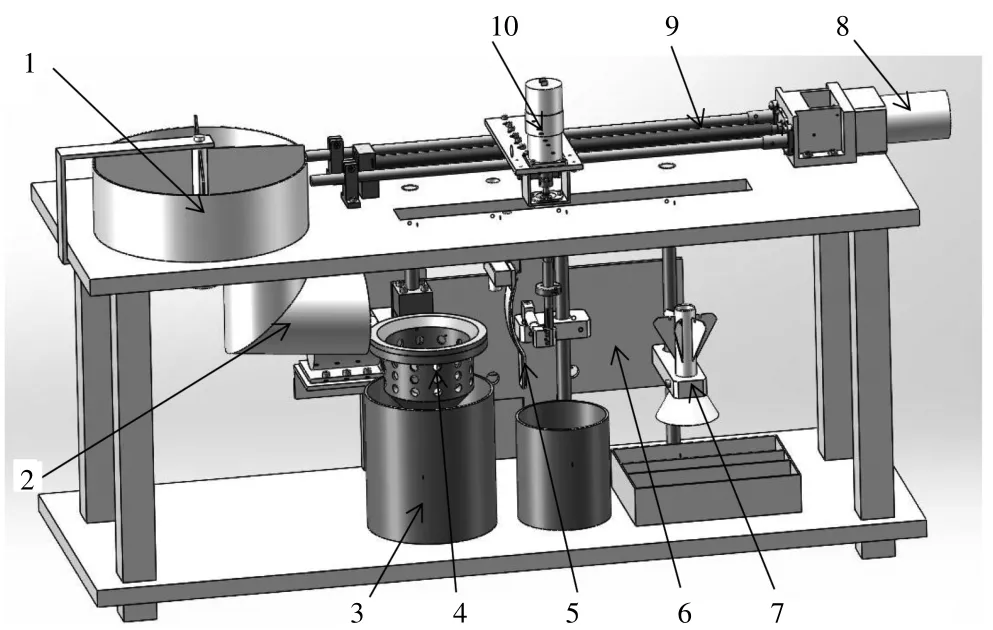
图1 一体机整体结构图
该一体机工作原理如下:人工将苹果放至投料模块1 的转盘中,在投料模块电机的驱动下转盘旋转,使苹果通过输送管2 进入矫位滤网4,通过升降模块6 的电机驱动升降模块6 带动矫位滤网沉入矫正桶4 内,矫正桶内充满苹果清洗液,苹果在桶内浸泡清洗,同时通过浮力作用,校正苹果的位置形态,清洗完成后,矫位滤网在升降模块的带动下带动苹果离开水面。主轴插刀模块10 在电机8 的驱动下依靠丝杆9 带动向左横向移动,使主轴插刀模块的插刀移动至矫位滤网中心偏上位置,矫位滤网在升降模块的带动下沿着竖直方向向上移动,插刀对心插入苹果。随后矫位滤网下降,电机8 驱动带着苹果的插刀向右移动至去皮模块5 的位置,在主轴插刀模块电机的驱动下,苹果随着插刀沿着竖直方向移动,同时通过去皮模块5 的仿形挡片配合升降模块使浮动刀头紧贴苹果表面旋转完成去皮。去皮完成后,苹果随着插刀向右横向移动,进入苹果去核分瓣环节,去核分瓣模块7 在升降模块的带动下向上移动,分瓣刀对心插入苹果对苹果进行去核分瓣处理,随后苹果沿着竖直方向掉落至苹果收集容器中。
2.1 投料功能模块
为了实现苹果周期性平稳下落,投料功能模块通过投料转盘,其由四分推板以及保护模块组成,把苹果平稳地送进输送管道,完成投料环节,如图2 所示,通过电机的驱动作用,促使投料转盘运转,由于多数苹果的直径为8cm 左右,环形苹果保护罩根据苹果直径的大小设计,其与四分推板组成转盘,并随着中心轴的转动而转动。转盘底部有一个半径为50 mm的圆形孔,其接上塑料管道,使苹果顺利投入矫正桶,塑料管道由橡胶材质组成,在对苹果运送的过程中有一定的保护作用。

图2 投料功能结构图
2.2 矫位功能模块
矫位功能模块的组成元件主要有矫位滤网与矫正桶,在运行过程中不仅可对苹果进行清洗消毒,还可对苹果的位置进行矫正,保证苹果下落后能保持有梗的一端呈向上的形态。
矫正苹果位置的原理是通过水的浮力作用于苹果,进而矫正其摆放位置。由于苹果带梗朝上时,从上往下看苹果关于中心轴对称,而水平方向并不是轴对称图形,苹果浸泡在水中其表面受到垂直方向的压力,再与浮力相配合,可以达到矫正位置的效果。矫正滤网如图3 所示。

图3 矫位滤网结构图
苹果落入矫位滤网后,通过电机的驱动使升降模块向下移动,进而将苹果带入矫正桶,苹果在矫正桶中被清洗的同时其位置也被矫正,此过程完成后苹果被矫位滤网带出矫正桶,由于滤网的V 型设计,苹果在滤网中会被中心定位,滤网在对苹果带出矫正桶的过程中,能保证其位置不发生改变,进而保障后面的插刀过程能顺利进行。
2.3 主轴插刀功能模块
如图4 所示,主轴插刀模块由主轴电机、联轴器、插刀轴、轴承、轴承座、轴承座连接件和限位固定环等组成。在主轴插刀模块设计过程中,为确保插刀能够顺利插入苹果和固定苹果位置,插刀刀头由钢制材料制造而成,且使用四棱刺结构。主轴电机通过联轴器带动插刀轴发生转动,利用插刀轴转动时苹果产生的离心力及苹果自重力,和去皮功能模块配合完成苹果去皮工作。为了实现苹果去皮后再进行苹果去核和分瓣,在插刀结构上添加了一对角接触球轴承,轴承的内圈利用插刀轴上的轴肩与螺母进行固定,外圈则穿过轴承座,使用挡圈固定。除此之外,还在插刀轴上设计了苹果限位固定环,根据苹果的实际大小可以调节刀尖露出的高度。

图4 主轴插刀模块结构图
2.4 去皮功能模块设计
去皮功能模块主要由刀架、刀片、仿形挡片和升降滑块组成,如图5 所示。刀架的刀杆和仿形挡片紧密相贴,保证刀片与苹果始终接触。
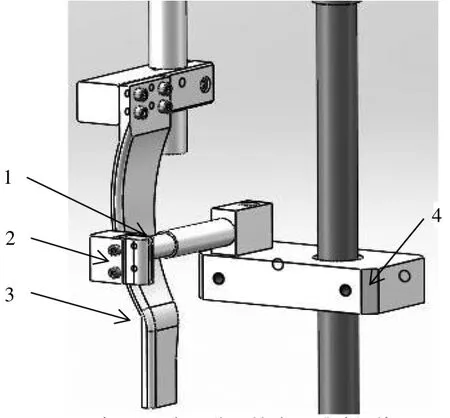
图5 去皮功能模块结构图
在去皮功能模块工作时,在主轴插刀模块电机的驱动下,苹果随着插刀沿着竖直方向移动,同时通过仿形挡片配合升降模块使浮动刀头紧贴苹果表面旋转完成去皮,使去掉的苹果皮厚度尽量一致。去皮刀片的结构为中空弧头形,选取该结构的目的是为了方便收集苹果皮以及保证去皮后苹果表面的光洁程度。
2.5 去核分瓣模块设计
去核分瓣模块结构如图6 所示。该模块主要由导向杆、去核分瓣刀、分离罩及升降滑块组成。从图6 可看出去核分瓣刀由6 片均匀分布的刀片构成,除此之外,去核分瓣刀与升降滑块通过螺钉的作用相互连接。
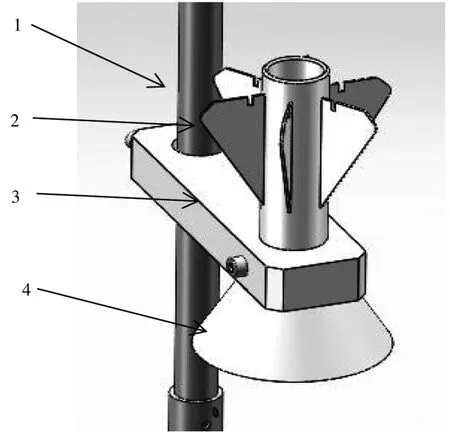
图6 去核分瓣模块结构图
该模块的工作原理为:苹果去皮完成后,在左右移动模块驱动下移动至去核分瓣刀的正上方,然后再经过上下升降模块迅速抬起去核分瓣模块,去核分瓣刀的空心圆形钢管插入苹果正中心,果核被插入圆形空心管内同时实现苹果的去核及分瓣。苹果去核分瓣完成后,在分离罩和空心管的作用下,果核和果肉掉进不同储存器中,最终实现果核和果肉瓣的分离避免混料。
2.6 升降功能模块设计
升降功能模块采用如图7 所示传动方案。该方案为圆柱齿轮-齿轮齿条二级传动机构组成,电机驱动一级圆柱齿轮传动,再带动二级齿轮通过与安装在升降安装板上的齿条啮合,达成由旋转运动变为直线运动的转化。通过控制电机的正反转运动,来实现升降模块的升降。

图7 升降功能模块结构图
2.7 左右移位功能模块设计
移位模块采用滚珠丝杠副传动。由电机驱动丝杠带动螺母,螺母带动主轴插刀模块进行左右移动。同时为了支撑和引导主轴插刀模块运动,设计了导向轴结构,具体结构如图8 所示。

图8 左右移位功能模块设计图
3.1 驱动源的选择及生产要求的确定
为了准确控制自动苹果去皮去核分瓣一体机各功能模块的驱动,即投料四分板的驱动、主轴插刀的驱动、左右移位丝杠的驱动以及升降模块的驱动。苹果加工时间的把控十分严格,通常在5 s 左右就要完成一个苹果的去皮及去核分瓣。基于苹果去皮及去核分瓣机器的设计可以认为去皮工序需要1 s 左右,去核分瓣工序需要4 s。为了适应此机构的自动化,选配套有减速箱的电机更为合适,故此驱动源选用直流减速电机。
3.2 主轴插刀电机的选型计算
一般地,在1 s 左右完成苹果去皮需要主轴插刀旋转速度达15 圈/s,即所需的转速为900 r/min。查阅相关电机机型资料可知60GA775 型直流减速电机刚好满足此要求。
3.3 投料四分板电机的选型计算
基于该生产要求,预先设定生产周期为5 s。为此,投料四分板机的转盘的转速需要达到n= 12s/r=5 r/min。查阅相关电机机型资料,选择38GX38652-12-50 型直流减速电机。
3.4 升降功能模块电机的选型计算
升降功能模块需要带动升降板,升降板上固定有矫位滤网安装架,去皮刀架和去核分瓣刀通过升降滑块固定在升降板上。该模块在工作时,不仅需克服模块自身的重力,还要克服插刀去核分瓣动作时的阻力。因此,对于各部位的材料选取必须合理,比如滤网安装架以密度为籽= 1.02 g/cm3的ABS 塑料材料为原材料、分离罩以密度为籽= 2.92 g/cm3的铝合金为原材料。本设计升降模块的升降运动为滑动摩擦,在润滑条件充分的情况下滑动摩擦阻力忽略不计。插果去核分瓣的阻力参考同类产品资料取10 倍的果重即:

总的需克服的力F总=mg+F阻= 4.04 kg 伊9.8 m/s2+19.6 N = 59.2 N
其中mg为整个升降模块的自重力。

式中,KA为工况系数,查《机械设计手册》表取1.2;
F总为所需克服的作用力;
V1为升降速度,按工况要求及苹果高度取0.1 m/s。
代入式(1)得:P= 7.1 W

式中:浊为从电机至齿条传动装置的总效率,联轴器浊1、轴承浊2、齿轮传动浊3 和齿条的传动效率浊4:查《机械设计手册》表1-1-3 得:

将数据代入式(3)得浊= 0.88 再将浊代入式(2)可得电机输出功率PO= 8.1 W。电动机的额定功率

因升降模块的升降速度根据工况要求选取为0.1 m/s,根据式(5)便可计算出电机转速:

式中:d为齿轮分度圆直径,36 mm;
n为齿轮转速,53.1 r/min
查阅机械设计手册表15-1-5 可以得出二级开式传动最佳转动比取值区间为[1.5,4],因此电机的转速适合控制在80 r/min ~ 212.4 r/min。通过查阅相关电机机型资料选取60GA775 型电机,额定功率35 W,额定转速100 r/min。
3.5 左右移位功能模块电机的选型计算
本设计的左右移位模块的给进速度V2需保持在0.32 m/s。查丝杠选型表《机械设计手册》表13-1-33,因本模块的质量为2 kg,比一般平均外径较小的丝杠的质量低得多。故选择BSSZK 型1210-3 号内循环滚珠丝杠副,其技术规格参数见表1。

表1 滚珠丝杠副技术规格参数
根据表1 规格参数可得,BSSZK 型1210-3 号内循环滚珠丝杠的导程P 为10 mm,若需让V2保持在0.32 m/s,那么丝杠的转速必须在1176 r/s 以上,因此可以选用型号为130st-m04205 的电机来满足丝杠的转速要求。
根据设计方案,使用了Solidworks 软件对各机构进行设计建模并进行了相应的运动仿真分析。图9 为仿真运动至自动矫正苹果位置,图10 为仿真运动至苹果去皮位置,图11 为仿真运动至去核及分瓣位置,整个运动仿真过程中机构运行顺畅,无干涉。通过仿真验证,此一体机将降低人的劳动强度,提升生产效率。

图9 自动矫正苹果运动仿真
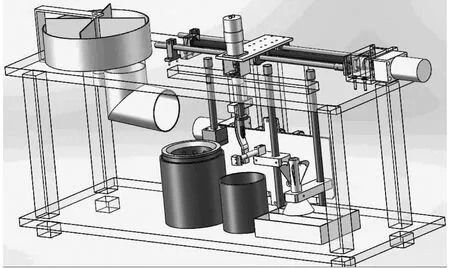
图10 去皮运动仿真

图11 去核及分瓣运动仿真
根据市场实际需求和现有苹果去皮去核机不足,设计了一种结构紧凑的新型自动苹果去皮去核及分瓣一体机,确定了该设备装置各个结构的原理,对运动模块所需的电机进行了选型,使用Solidworks 软件对该设备进行了建模及运动仿真,保证了各个机构之间无干涉,能够有效节约加工时间。设计将一体机总成结构按功能模块进行拆分,其功能按照动作分解成7 大功能模块。能实现苹果周期性平稳下落,可完成不同大小苹果的完整去皮,并能同时完成分瓣功能。有利于提高生产效率。该设计已得到了部分公司的认可。
猜你喜欢 投料去皮滤网 吨包拆袋投料站的创新设计与应用粮食加工(2022年1期)2022-03-23浮法玻璃生产线斜毯式投料机在线检修实践玻璃(2022年1期)2022-02-23燃气过滤器滤网流阻特性及压差评价煤气与热力(2021年10期)2021-12-02不同去皮方法对猕猴桃去皮效果和品质的影响湖南农业科学(2021年2期)2021-05-17兰州石化80万吨乙烯机组一次投料开车成功水泵技术(2021年4期)2021-01-22——去皮">茄子——去皮饮食科学(2019年1期)2019-02-23主给水泵滤网压差高问题分析及设计改进中国核电(2017年3期)2017-11-20网式过滤器滤网堵塞成因分析与压降计算农业机械学报(2017年9期)2017-10-11核桃仁不同去皮工艺的对比研究农产品加工(2017年11期)2017-07-31智能投料机远程监控系统①计算机系统应用(2017年5期)2017-06-07








