面向闸门门头运行轨迹检测的激光跟踪方法研究
时间:2023-01-23 13:40:05 来源:柠檬阅读网 本文已影响 人 
彭 浩 王化明 周凯强
(1.江苏省周山河船闸管理所,江苏 泰州 225300;
2.南京航空航天大学机电学院,江苏 南京 210016)
人字闸门或三角闸门转动时,门体以底枢中心与顶枢中心间的轴线为中心轴转动。底枢是闸门中最易磨损的部件,其在水下工作,球面摩擦副润滑失效就会导致底枢球轴头磨损。当底枢或顶枢产生磨损导致轴线偏移时,门体工作状态就会恶化,通常可通过检测闸门门头跳动量来判断闸门的工作状态[1-2]。现有人字闸门或三角闸门门头跳动量检测方法为经纬仪测量法,需要将闸门停止在若干角度,既影响船闸的正常通航,又需要较多人工,无法实现门头跳动量的自动在线检测和闸门全行程的检测。
人字闸门或三角闸门的门头运行轨迹能反映闸门全行程的运行状态,通过不同时间和位置运行轨迹数据的对比分析,既可以计算得到闸门门头跳动量,又能得到门头轨迹的历史数据,为闸门运行状态的分析提供客观数据。闸门门体尺寸较大,采用全站仪、激光跟踪仪和摄像机测量系统等设备可以获得门头的空间坐标,得到门头的运动轨迹,但其价格昂贵,目前还不能实现全行程自动检测,不适用于船闸现场闸门门头运行轨迹的自动检测[3]。因此,本文提出了一种基于二自由度激光跟踪的闸门运行轨迹检测方法,可为将来实现闸门全行程自动化轨迹检测提供思路[4-5]。
1.1 系统设计方案
二自由度激光跟踪系统设计方案如图1所示,激光测距仪发射的激光光束经过分光棱镜,通过转镜反射至靶镜(角锥棱镜),靶镜将激光束按入射方向的反方向平行返回,经过转镜反射到达分光棱镜。
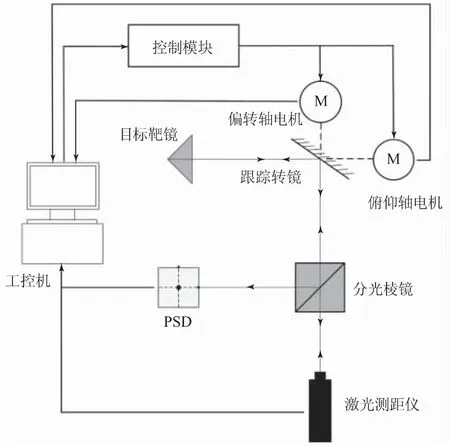
图1 激光跟踪系统设计方案
此时激光光束分成两部分:部分激光光束返回激光测距仪,完成距离测量;
部分激光光束反射至PSD(Position Sensitive Device)上,得到光斑当前坐标。控制模块根据光斑当前坐标与初始坐标之差计算俯仰轴电机与偏转轴电机需要转过的角度,使得光斑坐标回到初始坐标,实现对靶镜的实时跟踪。工控机根据激光测距仪的距离信息、俯仰轴与偏转轴电机编码器转角,计算靶镜的空间三维坐标。
1.2 系统组成
系统由工控机、二自由度激光跟踪测量装置、靶镜等构成。激光跟踪测量装置结构如图2所示,包括激光测距仪、分光棱镜、PSD、支架、偏转DD马达、俯仰DD马达、俯仰轴座、俯仰轴、转镜等。激光测距仪、分光棱镜和PSD固定安装于支架内,保持如图1所示的位置关系。偏转DD马达安装于支架上,使得激光测距仪的激光光束与偏转DD马达的中空轴线重合。俯仰DD马达及俯仰轴座安装于偏转DD马达上,带动俯仰轴转动,且偏转DD马达的轴线与俯仰DD马达的轴线垂直且相交。转镜安装于俯仰轴上,且俯仰轴轴线位于转镜平面内。

图2 激光跟踪测量装置结构图
1.3 系统布置方案
系统布置方案如图3所示。工控机与激光跟踪测量装置设置于闸门顶枢处地面上,闸门门头安装靶镜。闸门转动过程中,激光跟踪测量装置一直跟踪靶镜,根据激光测距仪的距离以及俯仰角、偏转角即可计算出闸门运行过程中的门头三维坐标,形成闸门门头的运行轨迹。

图3 系统布置方案
1.4 跟踪目标的三维坐标计算
图4所示为目标三维坐标计算示意图,激光跟踪系统得到空间点的球坐标(l,α,β),其中l是被测点与转镜的距离,通过激光测距仪得到;
α是被测目标的偏转角,通过偏转轴编码器得到;
β是被测目标的俯仰角,通过俯仰轴编码器得到。被跟踪目标的球坐标可以通过式(1)转换为直角坐标系内的三维坐标。

图4 被跟踪目标三维坐标计算

1.5 系统跟踪原理
系统跟踪原理如图5所示。初始状态下,激光测距仪的激光束透过分光棱镜经转镜反射至目标靶镜处,此时光束正射靶镜中心。靶镜为角锥棱镜,激光会以入射方向的反方向返回,经过分光棱镜反射至PSD,得到跟踪计算的光斑初始坐标。

图5 系统跟踪原理
当被跟踪目标(靶镜)开始移动时,激光测距仪的激光束偏离靶镜的中心,靶镜的返回激光与入射激光平行,在水平与垂直方向会产生偏移量。靶镜返回激光经分光镜反射作用反射至PSD,激光光斑形成的当前坐标会偏离原光斑初始坐标,坐标变化量等于靶镜在水平和垂直方向的偏移量。
控制器采集PSD当前坐标,根据与初始坐标的偏差计算出激光光斑重回PSD初始坐标时的俯仰电机与偏转电机转动角度,则激光光束重射目标靶镜中心,在PSD上形成的光斑坐标回到初始坐标。重复上述过程,激光跟踪系统实现被测目标的跟踪。
2.1 激光跟踪系统的构建
构建激光跟踪系统,实物如图6所示,其中二维跟踪转台包括偏转DD马达、俯仰DD马达、俯仰轴,跟踪测量光路包括激光测距仪、分光棱镜、转镜和PSD。为方便试验,将靶镜固定安装在线性运动平台上,当平台运动时激光跟踪系统实现对靶镜的跟踪。

图6 激光跟踪系统实物
图7所示为激光跟踪系统控制框图,其中运动控制器型号为JMC-804,采用PID控制律进行偏转电机与俯仰电机的运动控制[6]。运动控制器读取PSD当前坐标及电机编码器的输出角度,根据PSD当前坐标与初始坐标之间的偏差计算偏转电机与俯仰电机的控制量,控制跟踪转镜的偏转与俯仰,实现对靶镜的跟踪。经过多次测试,确定PID控制参数分别为:Kp=2、Ki=41、Kd=0.000 97。
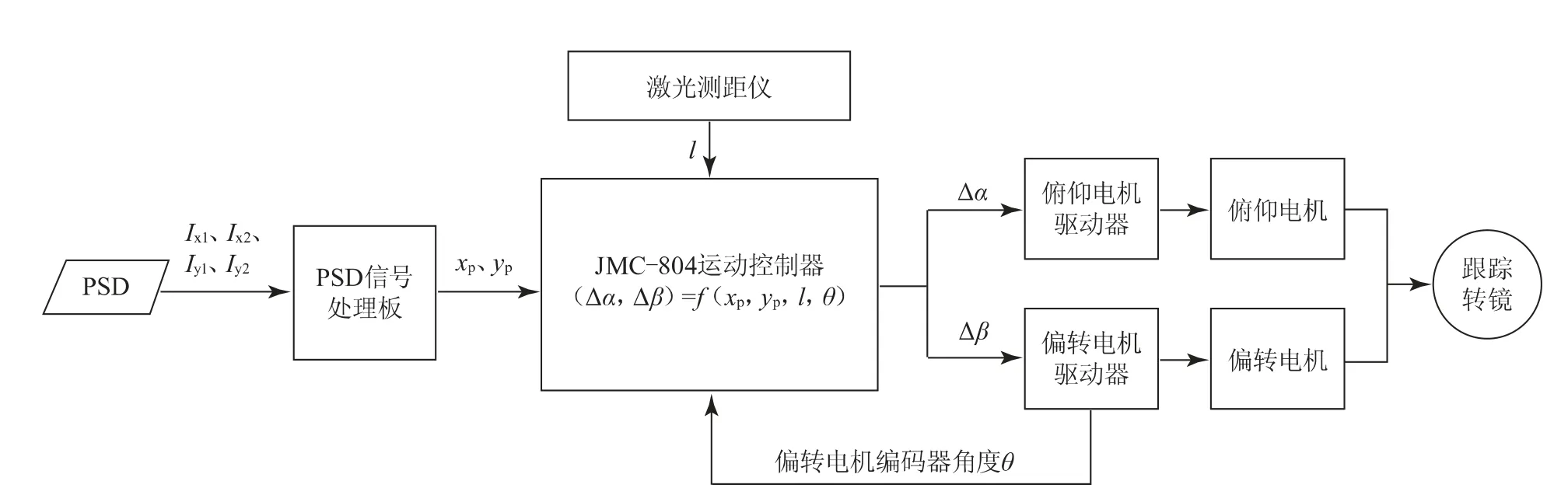
图7 激光跟踪系统控制框图
2.2 激光跟踪系统的跟踪测试
图8所示为目标(靶镜)激光跟踪测试示意图,分别测试系统在俯仰和偏转方向的跟踪性能。将靶镜固定安装于运动平台,当平台水平安装时测量偏转跟踪性能,竖直安装时测量俯仰跟踪性能。

图8 靶镜激光跟踪测试示意图
图9所示为目标跟踪时俯仰轴电机和偏转轴电机的理论跟踪角度计算方法,并与实际跟踪角度进行对比。
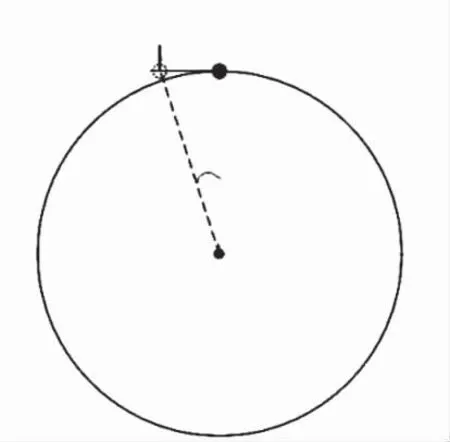
图9 电机跟踪理论角度计算
设靶镜沿Y轴运动速度为vy,运动距离为d,初始时靶球与转镜距离为ls,偏转电机跟踪角度α为:

同理,设靶镜沿Z轴运动速度为vz,俯仰电机的跟踪角度β为:

图10所示为对靶球的激光跟踪测试过程,结果表明,系统能够实现对靶镜的稳定跟踪,在跟踪过程中偏转电机和俯仰电机能及时响应,控制激光光束位于靶球的中心。

图10 靶球的激光跟踪过程
图11所示为在40 mm的跟踪行程内,偏转轴与俯仰轴的实际与理论跟踪角度的对比,可以看出两者偏差随靶镜移动发生变化,但偏差不超过0.1°,验证了跟踪控制方法的有效性。

图11 偏转和俯仰电机的跟踪角度
2.3 系统跟踪重复精度测试
为测试系统重复性精度,设置平台的初始位置,控制平台移动一定行程后再返回初始位置,如此反复进行20次,激光跟踪系统持续跟踪靶镜,记录每次平台返回初始位置时的靶镜坐标。
根据记录数据计算得到测量坐标(x,y,z)的标准差,利用3倍标准差衡量重复性精度,分别为±71 μm、±80 μm和±23 μm,由于平台本身也存在定位误差,可以推断出激光跟踪测量系统的单点测量重复性精度优于80 μm。
本文介绍了面向船闸闸门门头运行轨迹的激光跟踪系统设计与构建,包括跟踪装置结构和控制器设计,试验表明该系统能实现目标的实时跟踪,跟踪重复精度优于80 μm,为闸门门头运行轨迹的检测提供了一种可行方法。
在以后的工作中,将进一步优化硬件和控制算法,实现更高速度和更远距离的高精度跟踪,为其在船闸的实际应用打下基础。
猜你喜欢 棱镜闸门马达 分配正义:以弱势群体为棱镜天水行政学院学报(2022年4期)2022-11-18通过法律、机器人和社会的棱镜与人工智能共生法律方法(2022年2期)2022-10-20大跨度桁架平面闸门静动力特性分析价值工程(2022年27期)2022-10-10水下机器人在长河坝电站导流洞闸门堵漏中的应用建材发展导向(2021年10期)2021-07-16不能怪我作文周刊·小学三年级版(2020年24期)2020-07-17大棱镜温泉学苑创造·A版(2019年4期)2019-05-10水晶棱镜三联生活周刊(2017年37期)2017-09-11枰中侠侣棋艺(2016年4期)2016-09-20找准入口,打开思路的闸门新高考·高一数学(2016年3期)2016-05-19浅谈不同类型闸门在水利工程中的应用科技视界(2015年18期)2015-08-15







