基于Halcon的AGV纠位系统研究
时间:2022-11-05 22:00:02 来源:柠檬阅读网 本文已影响 人 
史正倩,宋志峰,林富生,余联庆
(1.武汉纺织大学机械工程与自动化学院,湖北武汉 430200;
2.三维纺织湖北省工程研究中心,湖北武汉 430200;
3.湖北省数字化纺织装备重点实验室,湖北武汉 430200)
在现代工业物品搬运中,AGV小车不需要驾驶员控制,能够沿规定导引路径行驶,因而广受欢迎,发展迅速。目前,大多数AGV小车通过磁条导航、惯性导航、视觉导航定位。考虑适用性及成本等原因,目前多数学者对以视觉为主的导航方法进行研究。
工业上,多采用Halcon机器视觉软件,基于形状模板匹配的方法得到相应信息。为提高AGV小车运行的效率,学者们对模板匹配进行了一系列探索研究。宋莹莹等利用Canny算法和曲线凸性得到边界关键点,进行关键点匹配,但受光照影响大,匹配结果不稳定。孙秀娟提出了基于高斯尺度空间的模板匹配算法,与传统模板匹配算法比,消耗时间减少了90%,但匹配时间仍需200~300多毫秒。刘金保采用Sobel算法得到边缘信息,对搜索策略进行改进,提高了定位的准确性,但对较小的旋转角度检测不敏感。
本文作者提出一种基于Halcon的AGV十字色带纠位方法,对十字色带特征标志进行XLD轮廓匹配,实时纠偏AGV小车,提高由地面、电机误差造成AGV小车偏离的纠位准确度。经过实验与分析,该方法不仅能成功获取位置信息,而且匹配速度快、准确率高,具有很强的抗干扰性和鲁棒性。
1.1 系统结构
如图1所示,AGV纠位系统主要由光源、镜头、相机、步进电机及其驱动器、工控机组成。相机镜头与地面平行,AGV小车运行时,相机每隔2 s采集一次图像传输给工控机。AGV纠位系统所用相机为SY003-V01,工控机为STX-N61_I521E,程序开发环境为Visual Studio 2015,操作平台为Windows 7, Halcon联合C#编程对采集图像进行信息处理,PLC接收相关信息并对步进电机进行闭环运动控制,起到纠位作用。

图1 AGV小车系统
1.2 图像处理软件系统
图像处理软件系统基于由德国MVtec公司开发的机器视觉软件Halcon进行编程开发。图像处理软件系统主要分为4个模块:模板生成模块、图像采集模块、图像检测模块、数据交互模块。图2所示为视觉纠位的流程。
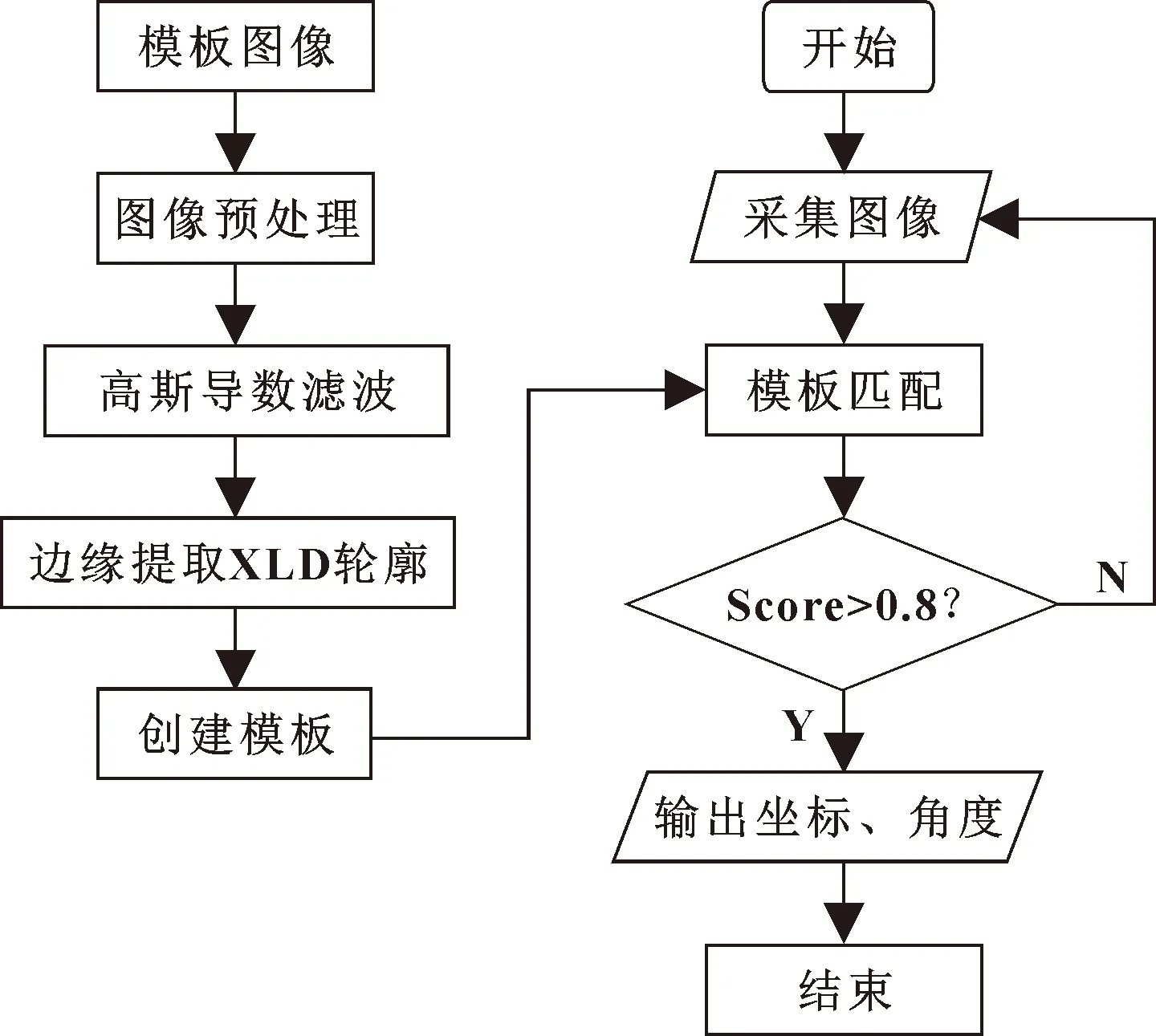
图2 视觉纠位流程
2.1 图像预处理
此系统采用200万像素、120°无畸变摄像头采集图像,将AGV小车摆正,单次采集一张色带图像。如图3所示,采集到的色带图像往往会存在阴影、畸变等缺陷。因此,在形状匹配前要进行预处理。

图3 采集的模板图像
2.1.1 图像校正
采集的模板图像与理想模板存在角度偏差,为减少由此导致的误差,对图像进行校正。使用rotate_image算子,将图像上的每个点在二维平面上绕该图像中心点(,)逆时针旋转。
将坐标轴上的原点平移到点,得到平移矩阵:

(1)
再旋转,得到旋转矩阵:

(2)
将坐标轴移回原位,得到平移矩阵:

(3)
最终得到校正矩阵:
=××
(4)
模板图像上任意一点绕中心点旋转后坐标为
=×
(5)
2.1.2 图像增强
采用基于XLD轮廓形状的模型进行匹配,对图像边缘细节要求较高。图3所示的采集图像存在大面积阴影,且边缘模糊不清,对后续描述点的提取有很大干扰。为此,使用emphasize算子对校正后的图像进行图像增强,消除部分干扰。
要使像素点之间灰度值差异大,有效消除部分噪声,在一定范围内,内核要尽可能大。因此,当图像大小为×时,创建一个大小为(4)×(4)的内核,得到新的像素值:
=(-)×+
(6)
其中:为内核的平均像素;
为原像素;
为影响因子。
图4所示为图像预处理后的效果,解决了拍摄畸变、光照不均的问题,为形状描述做准备。

图4 图像预处理效果
2.2 XLD轮廓模板匹配
传统形状匹配通过绘制ROI或者灰度值提取得模板形状,获取的形状描述不准确,会造成检测准确度低。此次检测目标主要是获得十字色带中心点像素坐标及其旋转角度,因而对匹配精度要求较高。为提高匹配精度与速度,以亚像素精度提取实例,采用XLD轮廓匹配法。
2.2.1 图像特征提取
利用高斯导数构造新的函数(,),用图片像素值(,)和(,)求卷积,得出滤波后图像(,)。
这里高斯函数为
疗效标准及结果:所根据的是MMSE。病人医治前后的分数值的差和病人医治前的积分值的比值。大于0.2说明病情很大的好转,小于0.2则是有了好转,小于0.12的病情没有变化。如果是负数那么病人的病情没有变好反而是变坏了。

(7)
其中:为高斯滤波系数,控制着和方向平滑程度。越小,高斯滤波频带越窄,卷积运算量越小,平滑程度也越弱,更精细的特征会被检测到;
反之越大,噪声和纹理抑制能力越强,大的边缘特征会被检测到。因此,根据实际图像选取值为3。
由高斯导数创建的新的函数(,)为

(8)
将新建函数与原图像进行卷积,得到滤波后的图像(,):
(,)=(,)⊗(,)
(9)
设一阈值加以判断,当卷积后得到的像素灰度值小于阈值时,输出像素最终灰度值′(,)为0;
反之,输出像素最终灰度值为255。然后再将图像翻转,实现边缘提取:

(10)
创建ROI,选取模板匹配主要特征,将得到的ROI区域转化为框架,进而将框架转换成XLD轮廓,轮廓提取成功。图5所示为经过创建的新滤波器滤波后的图像及其提取的XLD轮廓模板。

图5 XLD轮廓模板
2.2.2 中心点提取
一般通过ROI绘制区域或者绘制两区域得到的交集,获取中心点像素坐标。但手动绘制ROI误差较大,故通过XLD轮廓求中心点。
首先将XLD轮廓转化为4个不连贯的子区域A、B、C、D,再以长宽都为200像素的矩形结构扩展这4个子区域,使其两两相交都有交集,得新的子区域A′、B′、C ′、D ′,以及它们的交集区域E,如图6所示。最后,利用算子area_center就可准确求得模板图像中心点,坐标为(540.037,1 028.030)像素。
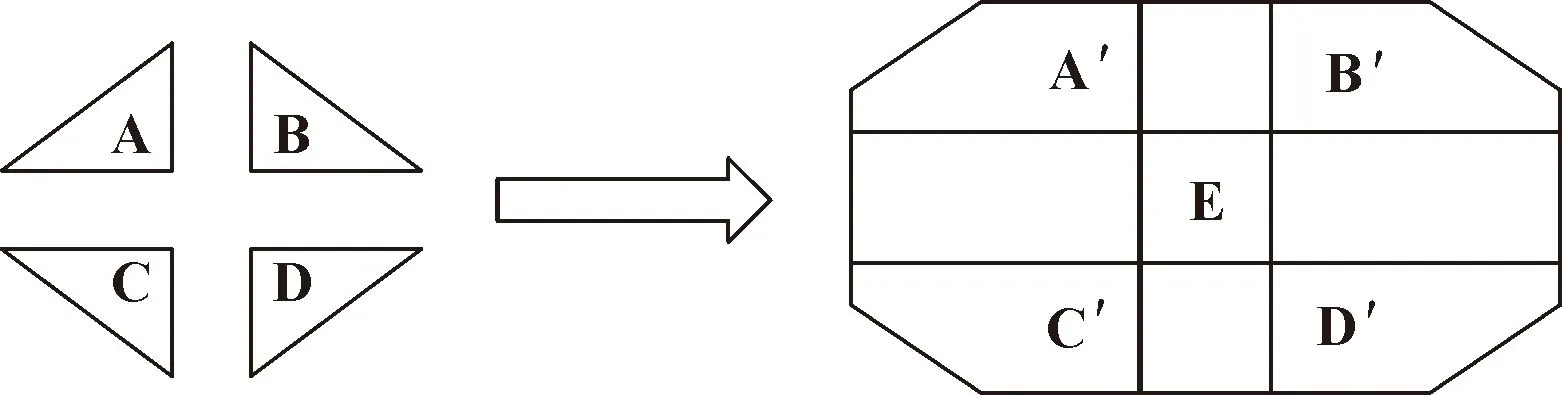
图6 轮廓交集
2.2.3 形状相似度计算
通过图5创建可缩放模板,缩放范围为05~15,旋转范围为-45°~45°,读取待检测图像,通过计算形状相似度对目标图形进行寻找。模板图像上有像素点=(,),=1,2,…,。
根据高斯导数滤波可得模板图像、方向梯度、,从而计算出检测图像上点(,)处相似度度量:
(,)=

(11)
任意像素点相似度度量值必须大于给定的阈值t,若小于阈值则停止计算,同时开始下一像素点的匹配。符合的点越多,匹配准确度越高。

(12)
S (13) 其中:g为贪婪度,贪婪值为0~1,贪婪度越大,匹配时间越短; 图像检测实验数据准确度直接影响纠位效果,为验证此系统的高速准确性,在搜索旋转范围为-45°~45°、图像缩放比例为05~15、贪婪度为07、匹配最小分数为05的条件下,进行100次实验。 在100次实验中随机抽取两组小车在行驶时采集图像的检测结果,如图7所示。可知:模板轮廓与实例边缘轮廓较为贴近,用于纠位的角度和中心点坐标也较为准确,纠位的准确度较高。 图7 模板匹配结果 记录实验100次的数据,得到相应的匹配准确率和匹配时间。每10组随机抽取一组,共抽取10组,如表1所示。 表1 模板匹配结果 将数据进行整理,结果如表2、表3所示。可知:轮廓匹配最低准确率为9529,最高准确率高达9884,最低准确率与最高准确率之间相差355; 表2 XLD模板匹配检测准确率 单位:% 表3 XLD模板匹配检测时间 单位:ms 为提高小车基于色带视觉导航的性能,本文作者运用机器视觉软件,将基于轮廓的形状模板匹配方法应用于纠位系统。该方法有效剔除了图像中的杂点,解决光照不均问题,并利用高斯导数得到了合适的边界轮廓,进行基于轮廓的形状模板匹配,提高了检测的快速性与准确性。结果表明:所提出的轮廓模板匹配检测结果平均准确率为9693,最高与最低准确率相差355;
S为匹配到每个实例完整度的最小分数,分数为0~1,分数越小,匹配难度小。考虑到实际图像的复杂程度及检测速度与准确度,经反复验证得到最合适g值为0.7、S值为0.5。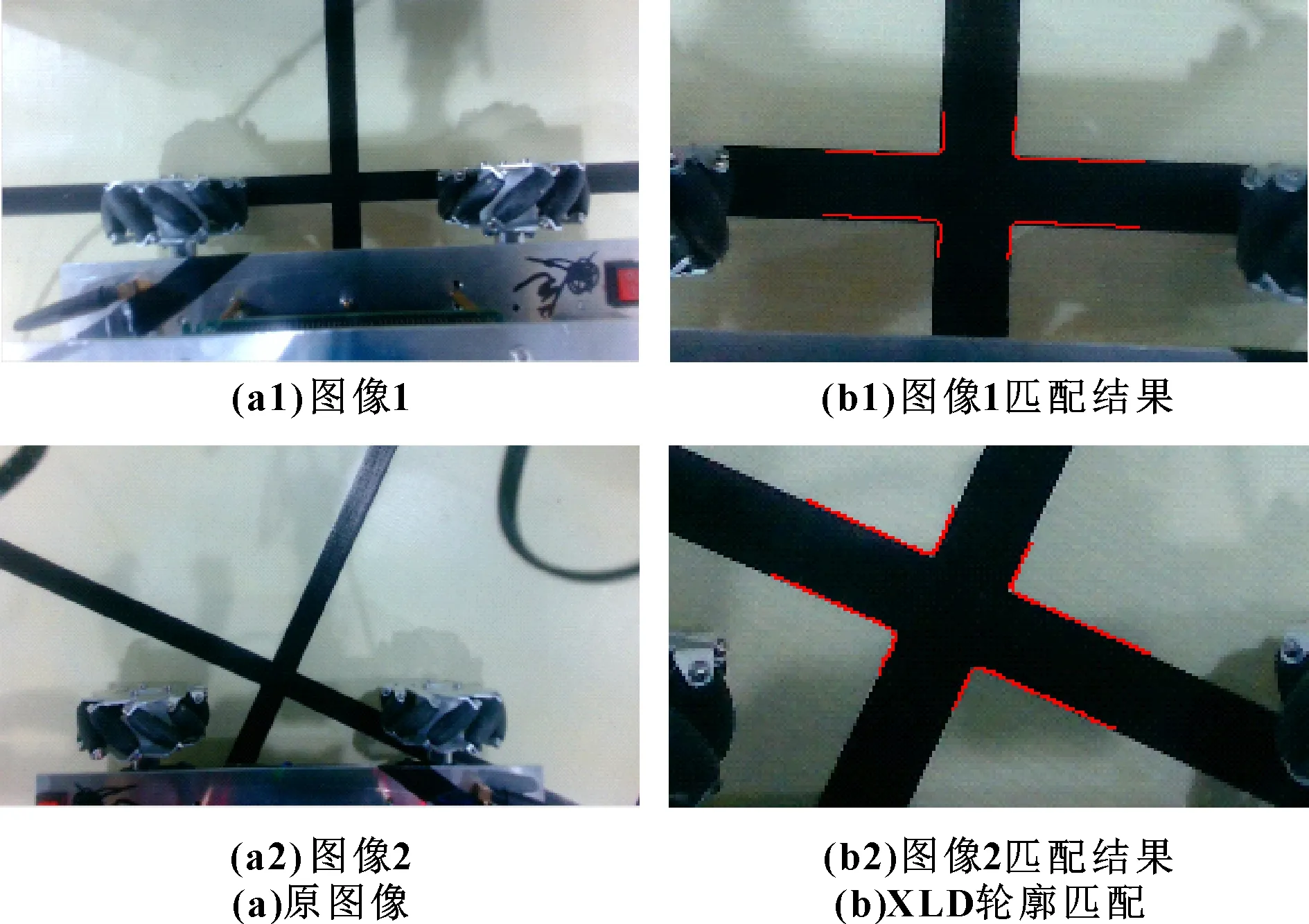
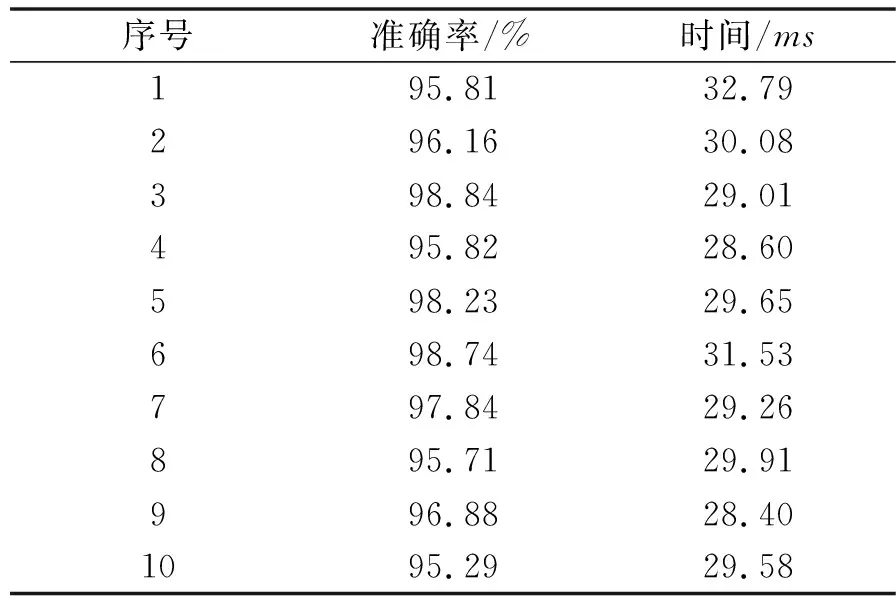
轮廓匹配最短时间为2840、最长时间为3279,两者之间相差439。由此可见,匹配的准确度和匹配时间都比较稳定。因而在实际应用中,基于轮廓匹配具有优势,其准确率高、匹配时间短、鲁棒性高,适用于纠位系统。

平均消耗时间为2988,最长与最短时间相差439。该方法不仅提高了纠位系统的可靠性和鲁棒性,也为小车以其他特征标志纠位导航提供了参考。








